请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:MSP430FR2676 《线程: Captivate - FR2676》中讨论的其他部件
我认为我的所有问题都得到了解决。
我目前有两个问题。
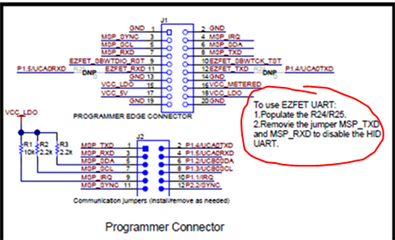
1)我无法让8x8共阵列工作,而我却能让2x2,4x4和6x6正常工作。 我注意到,当我使用8x8时,我的 CPU 使用率会达到100%,所以我假设我的计算机根本无法处理迷人设计工作室中的数据可视化效果? (这是一个与所附的 zip 不同的项目,用于调整)(我希望所附的后声道 UART 能够正常工作,因为如果我的计算机是限制因素,它不会通过设计中心显示信息,而只是在不显示可视化的情况下发送数据)
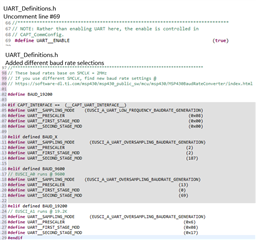
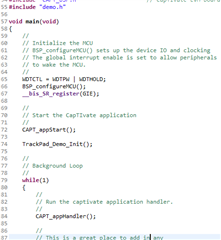
2)这是上述帖子的问题延续,我的预定义符号中有 UART_ENABLE =true,并且在 include 选项中包含演示文件夹,但仍在这些符号上出现未解决的符号错误。 我附加了 CCS 项目的 zip 文件。 设计中心的布局与上一个帖子相同。 (我使用示例后通道 UART 来确保我具有相同的预定义符号和包含的路径)
e2e.ti.com/.../MSP430FR2676_5F00_8X8_5F00_Mutual_5F00_UART.zip