

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:MSP430FR5994 在过去的几天里,我一直在尝试了解如何通过 计算机操纵杆将MSP430与MLX9.0333万霍尔效应传感器连接起来。
MLX9.0333万是一种有趣的芯片,因为主寄存器已经通过Melexis (PTC-04)创建的专有编程器进行编程。 从MCU的角度来看,他们暴露了一种“3引脚SPI模式” ,它由CS,CLK和共享Miso-MOSI组成。
根据数据表,单个x-y-z 8字节帧的通信包括以下内容:

在为此MSP430项目拆卸操纵杆之前,我确保连接一些迹线并捕获操纵杆在逻辑分析仪上的移动。 以下是单帧:
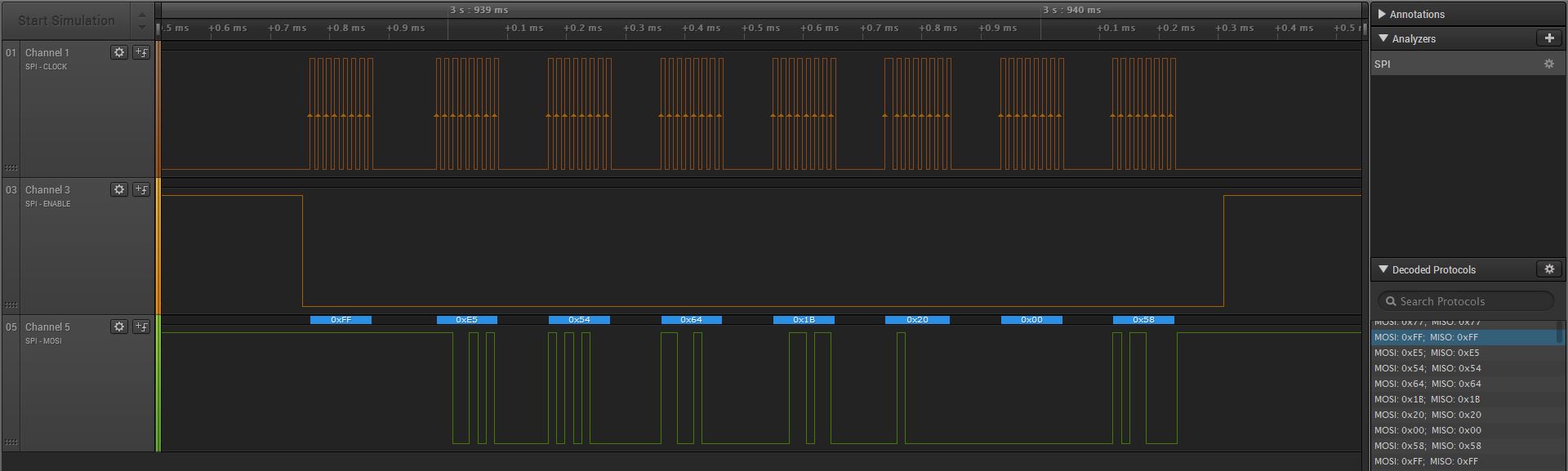
现在解决问题。 我想把我的头缠绕在他们所说的共享miso-mosi针脚上。 诚然,我在论坛上搜索过,确实找到了几个帖子,但我仍然不完全理解这个概念。 根据捕获结果,CS变为低电平,操纵杆发送1字节(0xFF),接收7字节返回(由x-y-z-CRC组成),然后CS变为高电平。
从软件的角度来看,如果我只写了1个字节(0xFF),我会很困惑如何得到7个字节。
