

主题中讨论的其他部件:TIDM-0.2003万, TIDM-0.2005万
您好,我们已成功开发出流量计,用于测量碳酸饮料的流量。 我们已在测试设置中通过它们注入了数万升的液体,结果与我们的相匹配
期望。
尽管如此,我们遇到了啤酒的间歇性问题。
有时,他们可以测量啤酒的大小。 其他时候,我们会遇到循环滑移!
当啤酒仍停留在流量计内时,absTof1,2为:
分别为52.411us和54.411us
由于啤酒没有移动,这必须是由于抑制算法锁定到不同的叶尖!!
由于激励信号的周期为1us,这相当于2个循环打滑。 我不仅检查了USS_ALG_Ratio_of_track_lobe相对于信号最大值的设置,
但是,由于峰之间相隔2个周期,因此不可能仅由不正确的比率导致这种情况!
在这段时间内,由于循环打滑,dToF估计值已完全关闭!
重新启动流量计后,问题就解决了!
两人都是1,2人
51.413
请注意,飞行的所有绝对时间几乎相同,仅因激励信号周期的倍数而异,这清楚地表明我们正在追踪错误的叶片!
我看不出这是由一个错误的叶尖跟踪阈值来解释的。
由于问题在重新启动后自行解决,我相信一个合理的解释是气泡或其他一些不规则性导致叶瓣跟踪算法锁定在错误的叶上。
后来,它一直被锁在那里,直到我重新开始整个过程,尽管超声波数据 看起来是有序的。
我很快就设法提取了UPS和DNS原始信号数据
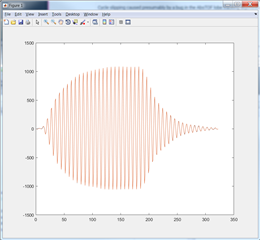
对我来说似乎很好!
如何解决这个愚蠢的问题?
我愿意采用自己的算法来计算飞行的绝对时间。 这不应该太难,我已经在Matlab中编写了一份有效的概念验证。
尽管如此,即使我这样做,它也不能修复循环滑移,这完全放弃了dtof计算。
我是否可以强制禁欲雅高从不跟踪并始终执行整个采集? —好的,我想了一个
我能不能在错误的禁欲下强迫dtof的估计成功呢?
或者 ,您能否告诉我们库的来源以便我自己解决问题? 显然,我们可以签署一份NDA
非常感谢。 我需要尽快解决这个问题,因为最后期限很短:/
