请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:MSP430L092 主题中讨论的其他部件: MSP430G2553, MSP430G2402
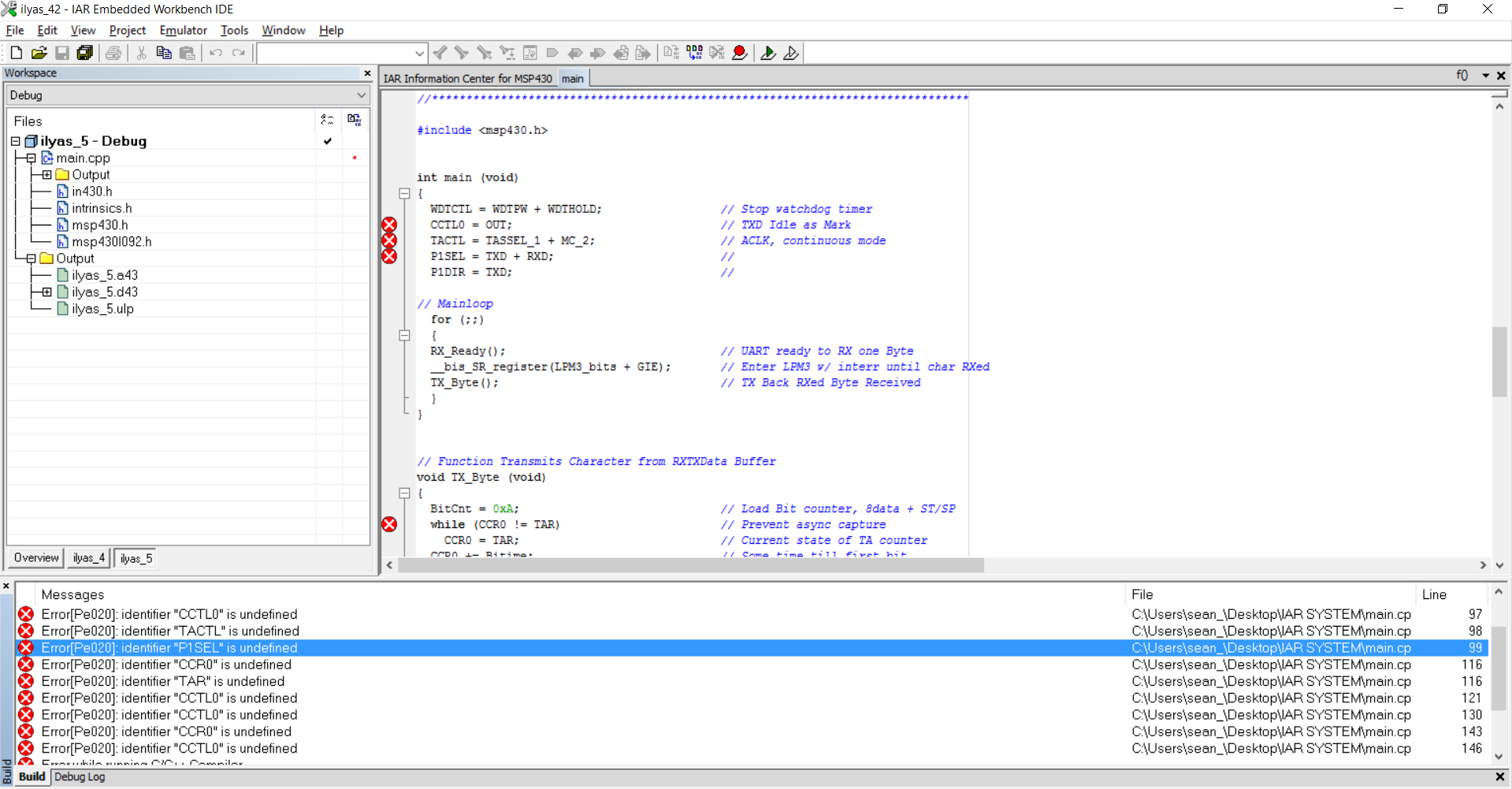
工具/软件:Code Composer Studio
我有一个关于msp430g2553的代码用于ADC模拟读取,但我想使用msp430l092来制作一个项目,因此当我尝试使用与g2553相关的代码时,我遇到了一个问题。 此代码与l092冲突。 如何创建用于读取模拟传感器值(光电二极管)的代码? 有人能给我一个代码吗? 此外,我意识到l092没有UART,因此无法在控制台终端上看到我的传感器值。