Other Parts Discussed in Thread: MSP430F5659, LMX2571
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:MSP430F5659 主题中讨论的其他部件: LMX2571
您好,
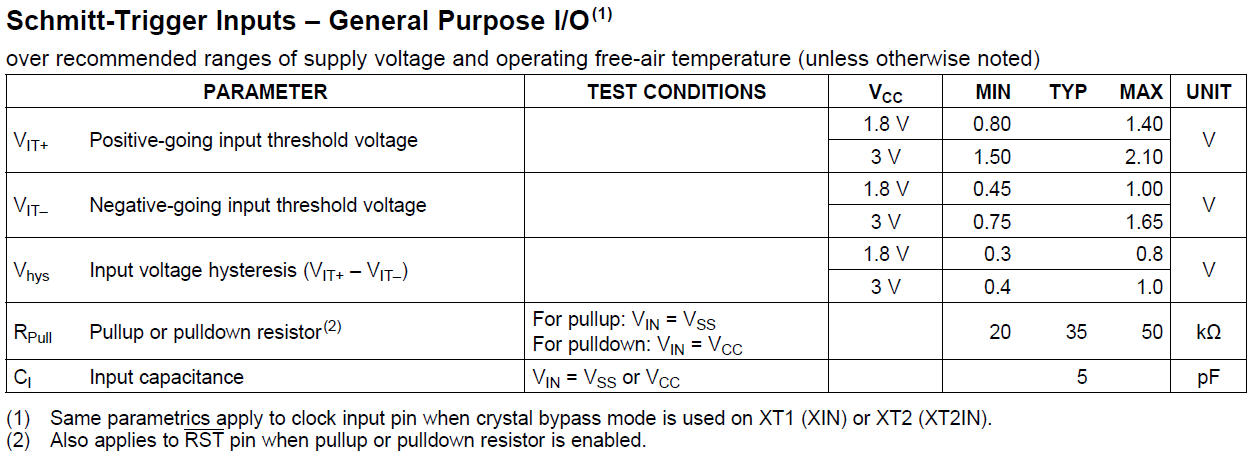
我目前正在使用msp430f5659设备。 我要做的是使用SPI从其它设备接收数据。 我的设备是FSK接收器模块,输出为0~1.5 或0~1.8 数字数据摆动。
是否可以使用来自其他器件而不是TI的这些数据?
谢谢
Jongchan Woo