This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/microcontrollers/msp-low-power-microcontrollers-group/msp430/f/msp-low-power-microcontroller-forum/968650/tidm-1021-about-single-sided-mounting
你好。
我正在评估 TIDM-1021板、并对耐液体触控感兴趣。
但电路板是双面安装。
是否有任何方法可以安装到单面板上并实现耐液体触控?
我想对电极使用灵活的传感器板。
此致、
U-SK
您好、U-SK、
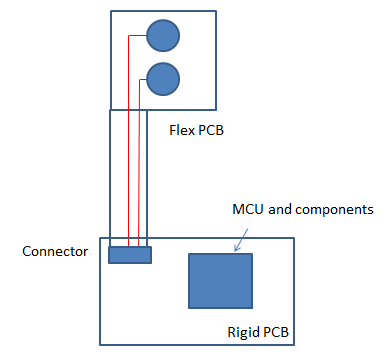
PCB 是双面的、因为电极(传感器)位于一侧、而组件位于另一侧。
我想您问是否可以在柔性 PCB 上创建传感器。 是的。 柔性 PCB 只能是传感器、并具有一个连接到 MSP430 CapTIvate MCU 所在的另一个 PCB 的尾端。
尊敬的 Dennis:
感谢你的答复。
我想使用透明材料(如 PEDOT)和柔性 PCB 来设计传感器电极。
但几乎柔性 PCB 制造商支持单面布局。
因此、我想使用单面柔性 PCB 制造耐液体触摸板。
我正在考虑采取以下措施。
1.用 TX 电极和 RX 电极分离每张单面纸、并将 PET 材料放入其中并粘在一起。
(如有必要、将 GND 板连接到背面。)
在 一侧植入 TX 和 RX 电极。 对 TX 电极进行剖面线、以避免从 RX 电极跟踪到 MCU。
是否可以通过上述方法实现这一目标? 你有任何疑虑吗?
是否有解决方案可通过单面柔性 PCB 实现 TIDM-1021?
我不是 PETDOT 的家族、尽管我看到它是一种柔性导电材料。
这是我的建议。 请随意绘制您的想法。
PEDOT 可用作 柔性、可生物降解的热电发电机、如下所示。
我想告诉我您所想到的柔性 PCB 侧。
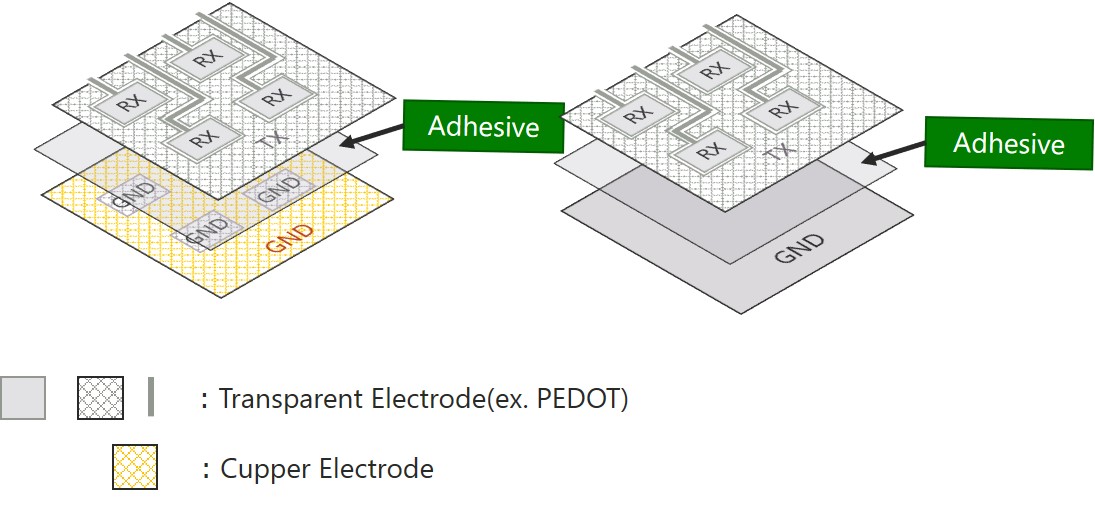
如果柔性 PCB 只能单面打印、我会考虑使用2张透明柔性 PCB 板。
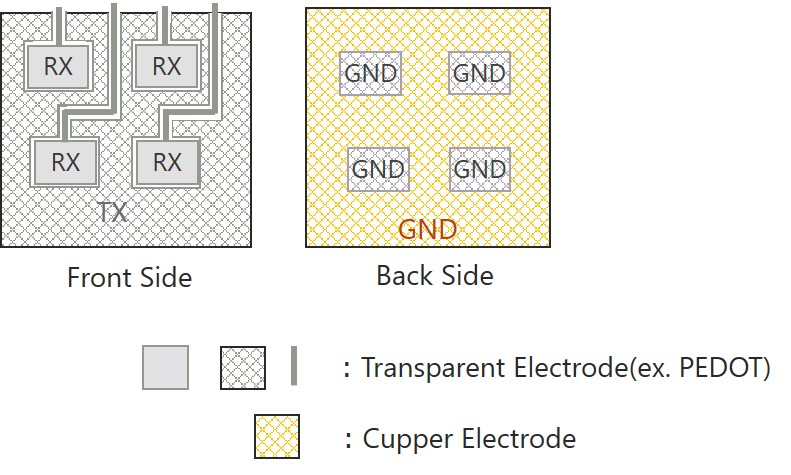
如果透明柔性 PCB 可以双面打印、并且无法放置通孔、我会考虑仅使用一张纸进行以下操作。
RX 电极和 RX 电极位置的 GND 区域应透明、以允许 LED 光通过。
我们能否实现耐液体触控、例如采取上述措施的 TIDEM-1021?
有任何问题吗?
是的、这些设计中的任何一个都可以正常工作。
查看 TIDM-1021时、RX 迹线隐藏在电路板后面、正上方似乎与 TX 相距。
我的想法是、RX 迹线将暴露在触摸表面上、并且会错误地检测我们是否接触到按钮以外的其他区域。
以上情况是否正常?
如果我们如上所述在透明柔性 PCB 上进行双面打印、则透明柔性 PCB 的厚度会非常小、以至于 GND 舱口表面和电极表面非常靠近。
在《CapTIvate 技术指南》中、建议 PCB 厚度应尽可能大。
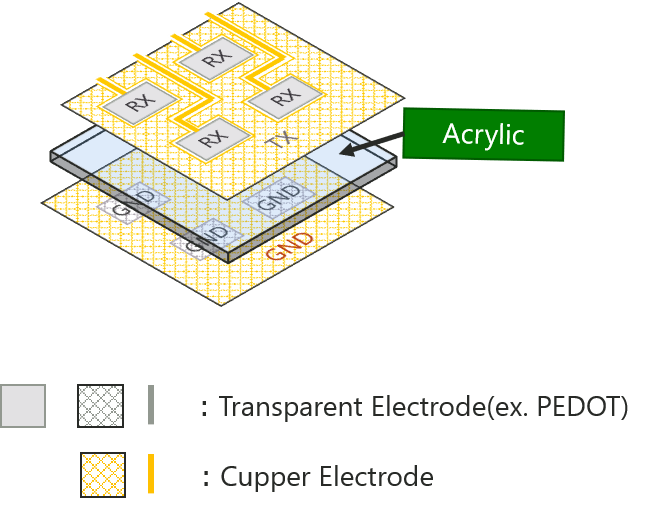
因此 、我想在电极表面和 GND 舱口表面之间留出空间、如下所示。
例如、当丙烯酸夹在它们之间时、介电常数不同于 FR-4。
需要多厚?
是否可以使用私人消息检查创建的光绘数据?
你有更新吗?
这是一个紧急项目、如果 您能尽快回复、我将不胜感激。
感谢您的合作。
关于 RX 迹线和触摸灵敏度、是的、这是很有可能的。 在常规 FR4上、布线可布置在底层、远离表面。 在您的设计中、您将无法做到这一点、因此我建议在 TX 网格填充和通向 RX 焊盘的布线之间留出较大的空间。
对于镀层、您永远不想将任何电极(RX 或 TX)暴露在环境中。 镀层是电容式触控系统的重要组成部分。 它可保护电极免受潮湿和潜在 ESD 的影响。 对于互电容传感器、它还可防止手指"短接" TX 和 RX 电极之间的电容。
可以,您可以发送私人邮件以包含 Gerber 文件。
您的回复。
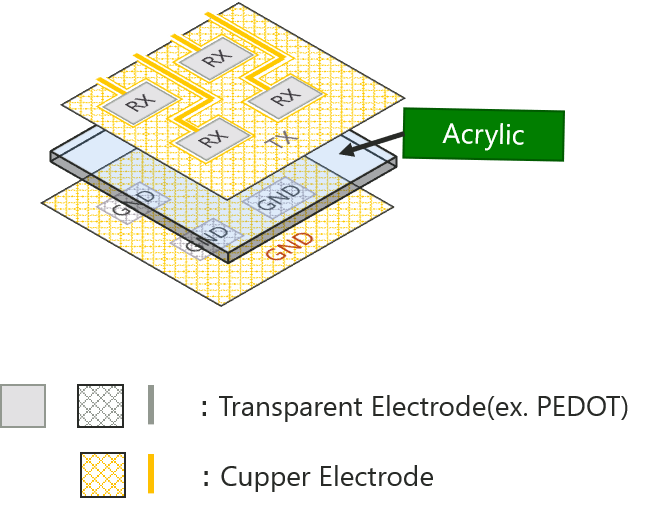
首先,我和朋友一起去了。
请确认。
尽管下图中未显示、但我将单独准备 PET 作为覆盖层并将其覆盖。
因此、上面所述的丙烯酸用于 GND 网格表面和电极表面之间的间距。
因为《CapTIvate 技术指南》描述如下。
H 变小、寄生电容增大、导致灵敏度降低。 在大多数应用中、使用两层 PCB、建议使用厚度为1mm 至1.6mm 的标准 FR4 PCB。
因此 、我认为丙烯酸也是获得高灵敏度所必需的、具有一定厚度、例如1到1.6 mm。
但是丙烯酸和 FR-4与介电常数不同、您认为丙烯酸需要多厚?
您对我的问题是否有任何更新?
如果您批准我的"朋友请求"、以便通过私人消息开始讨论、我也会非常感谢。
我已接受您的朋友请求。
对于您的问题、是的、底层接地与顶层电极之间的空间越大、灵敏度就越高。
对于自电容器设计尤其如此、而对于互电容器设计则不是如此。 相互、这是您尝试测量 RX 和 TX 电极之间的电容变化、不受下方接地的影响太大。
在这种情况下、材料的介电常数无关紧要。 如果您熟悉柔性 PCB 结构和层叠、则可以将各层靠近在一起、但必须注意传感器下方的接地覆铜密度。
尝试将您的文件秘密发送给我。
让我以私人信息继续进行更详细的讨论。