

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430F447 主题中讨论的其他器件:THS1206、 TMS320C6201、 ADS8342、 TM4C123FH6PM

您好!
我从 ADC 论坛收到了 MCU MSP430与 ADC THS1206 EVM 源代码、地址如下。
https://e2e.ti.com/support/data-converters/f/73/p/911632/3390319#3390319
/cfs-file/__key/communityserver-discussions-components-files/73/THS1206.zip
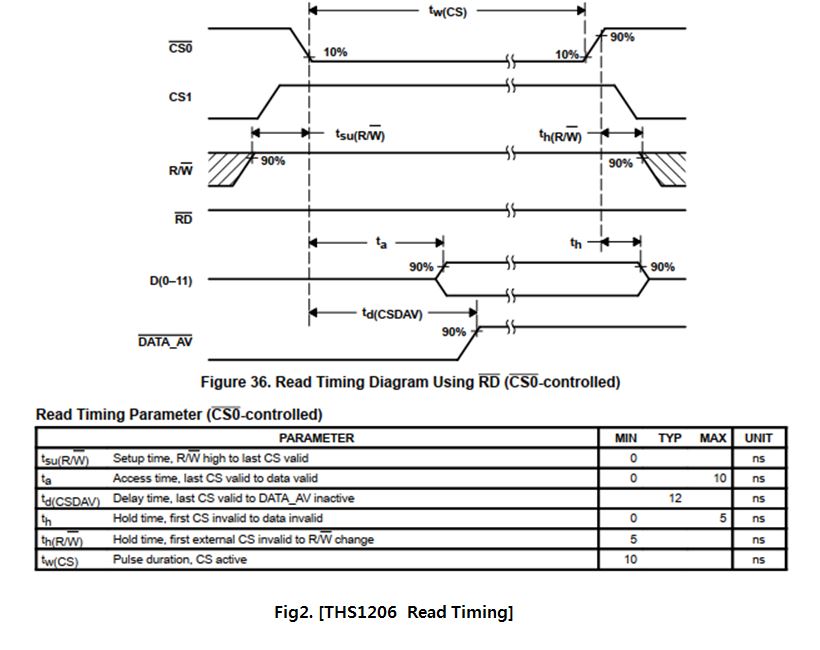
我不确定如何使用 MSP430x44x GPIO 模式实现如图2所示的读取时序。
Q1>如何以几个信号中的一个为例来生成 tw (CS)、tsu (R/NW)、TH (R/NW) of /CS0和 CS1信号?
请告诉我源代码位于上述地址的哪个位置?
此致、
Jame、Shin


