请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430I2040 主题中讨论的其他器件:EVM430-I2040S、
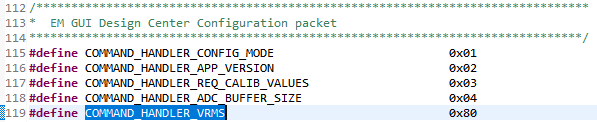
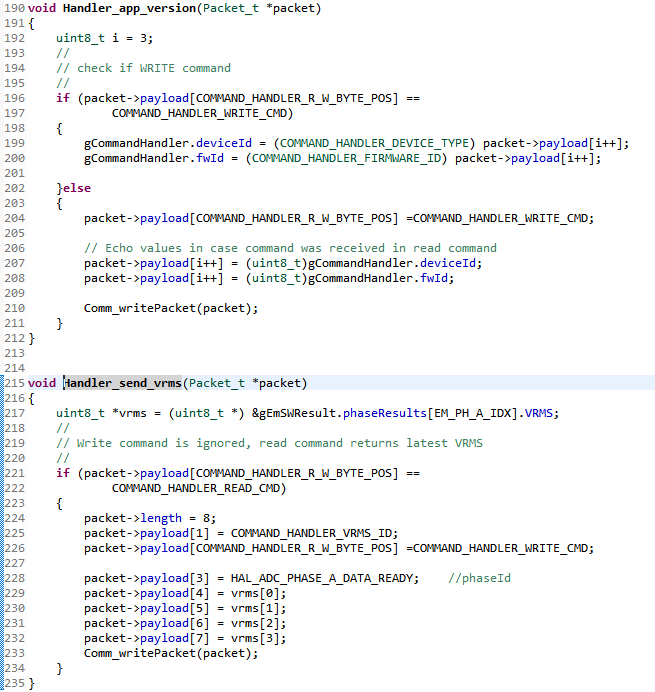
大家好、在 EMDC 为 i2040分项计量 EVM 生成的参考代码中、也提供了 I2C 接口。 使用我已启用的宏、它在构建时没有错误。 请注意、我们是否在此 EVM 上测试了 I2C? 如果是、请分享测试时使用的 I2C 主机示例。
大家好、在 EMDC 为 i2040分项计量 EVM 生成的参考代码中、也提供了 I2C 接口。 使用我已启用的宏、它在构建时没有错误。 请注意、我们是否在此 EVM 上测试了 I2C? 如果是、请分享测试时使用的 I2C 主机示例。