请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR5994 您好!
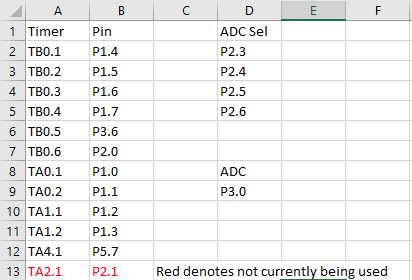
因此、我遇到了一个问题、就是我要通过 UART 将 ADC 数据发回计算机。 我有11个用于 ADC 的通道、我需要知道我接收的数据的计算机侧是哪个通道。 我似乎无法找到一种巧妙的解决方案、问题是如何知道数据的通道。
ADC 数据在0x0FFF 和0x0000之间输出。 在计算机侧、我检查2个字节以查看 MSByte (最高有效字节)中是否有0、如果没有、则数据会翻转。 如果我改为使用 MSByte 中的该0来执行0-B 来执行通道指定、那么我不知道哪一个是正确的前两个字节。 如果我发送一个任意的两个字节、那么我将无法判断它是 ADC 结果还是实际通道指定。 有什么想法吗? 我将 python 与 PySerial 一起用于与 MSP430FR5994通信。
谢谢!