请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430F5529 您好!
我有以下问题:我使用外部触发信号(~8kHz)通过 SPI 接口获取数据。
当在相应的输入端口上使用中断处理程序时、工作正常。 现在、我要尝试传输
通过 USB 接口传输数据(使用 CCS 附带的 TI CDC 示例代码(C6_SendDataInBackground))。
USB 数据传输工作正常(660kB/s),但是触发输入端口的中断不会定期生成。
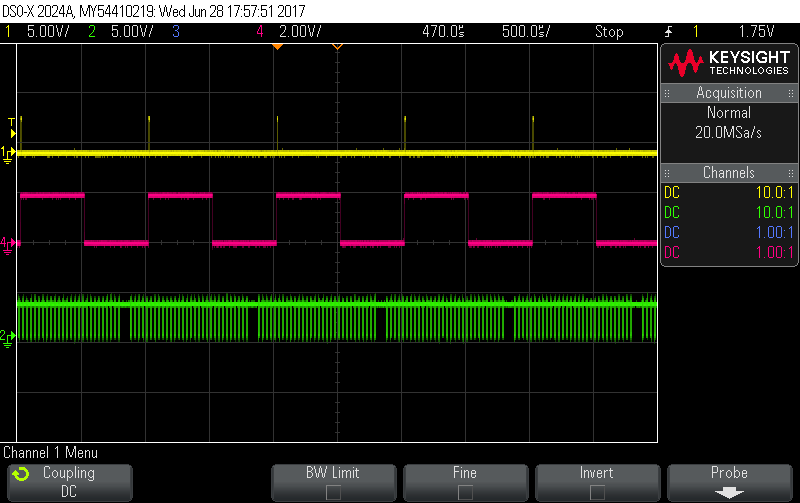
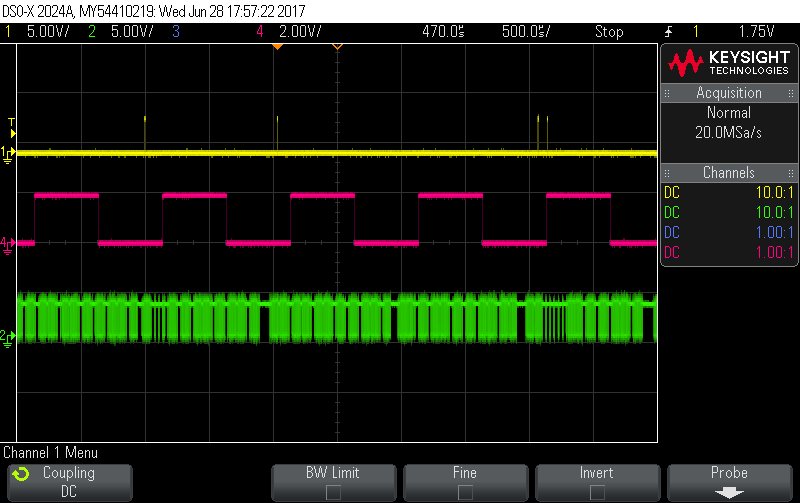
我已将代码简化为仅切换中断服务程序中的输出引脚、并且能够观察两个触发信号
示波器上的输出引脚...
我现在的问题是:在不丢失外部触发器的情况下使用 USB 进行数据传输的最佳方法是什么?