请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432P401R 我已经构建了一个新的电路板、我正在尝试使 I2C 功能正常工作。 每当我调用 MAP_I2C_masterSendMultiByteStart 时、我的代码就会挂起。 具体而言、在 driverlib 函数中的这一点上:
while (!BITBAND_peri (EUSCI_B_CMSIS (模态)->rIFG.r、UCTXIFG_OFS)) ;
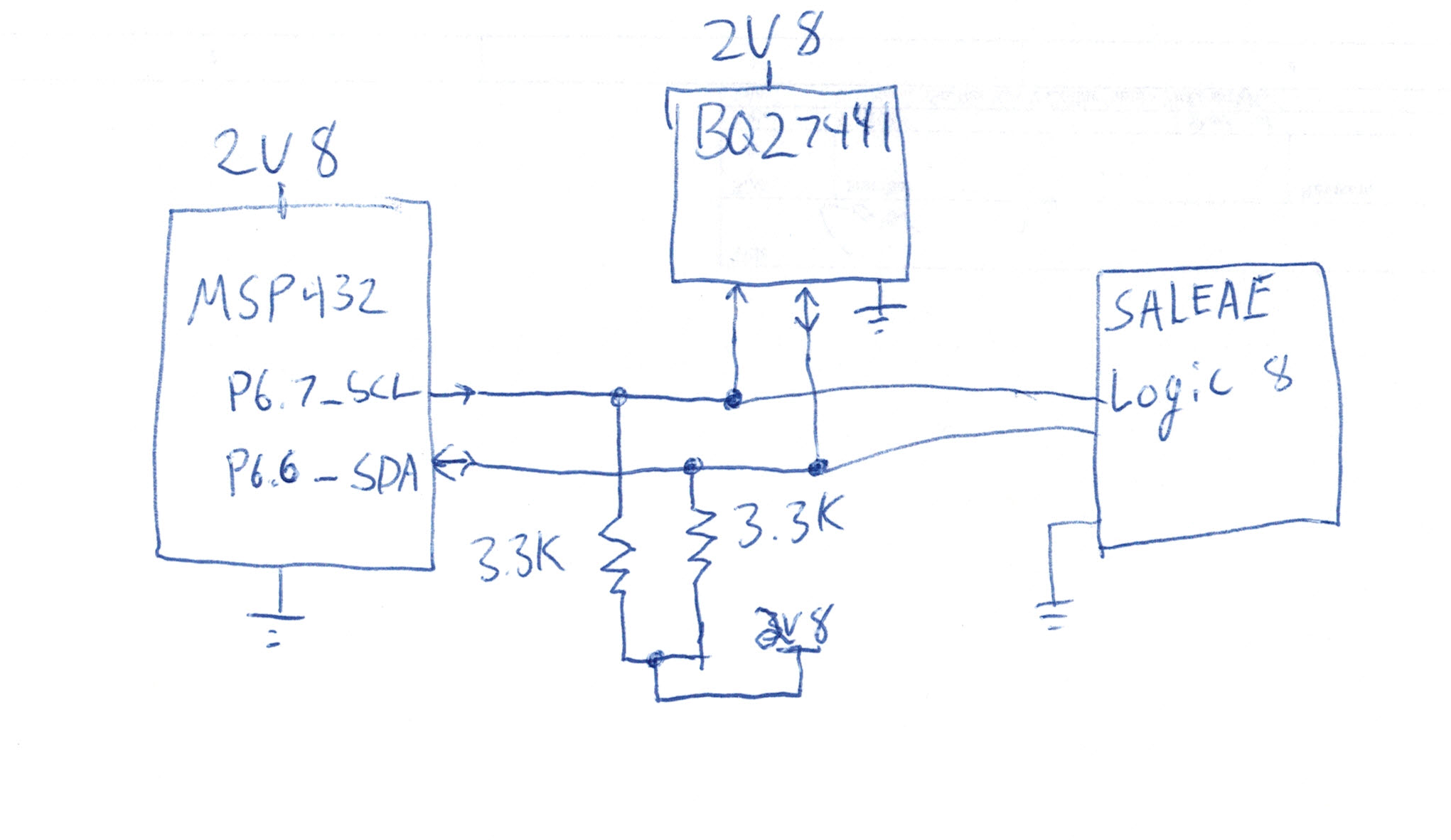
我正在使用示例、针对我正在使用的 SCL 和 SDA 引脚进行了更新(P6.6 - UCB3SDA、和 P6.7 - UCB.S)。
附件是我的代码。 是什么导致它挂起?
当我从逻辑分析仪查看我的代码时、它表明只有 SDA 发送数据、而 SCL 上没有发生任何情况。
我修复了 SCL 线路上的硬件错误(Toombstoned 终端电阻器)、现在我的逻辑分析仪上根本没有任何东西。 总线上的所有连接似乎都是完整的、并且似乎没有任何其他硬件错误。 终端电阻器为3.3K 欧姆。
 e2e.ti.com/.../i2c_5F00_master_5F00_rw_5F00_repeated_5F00_start_2D00_master_5F00_code.ce2e.ti.com/.../6708.startup_5F00_msp432p401r_5F00_ccs.c
e2e.ti.com/.../i2c_5F00_master_5F00_rw_5F00_repeated_5F00_start_2D00_master_5F00_code.ce2e.ti.com/.../6708.startup_5F00_msp432p401r_5F00_ccs.c