请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2153 主题中讨论的其他器件: MSP430FR2355、 MSP430WARE
您好!
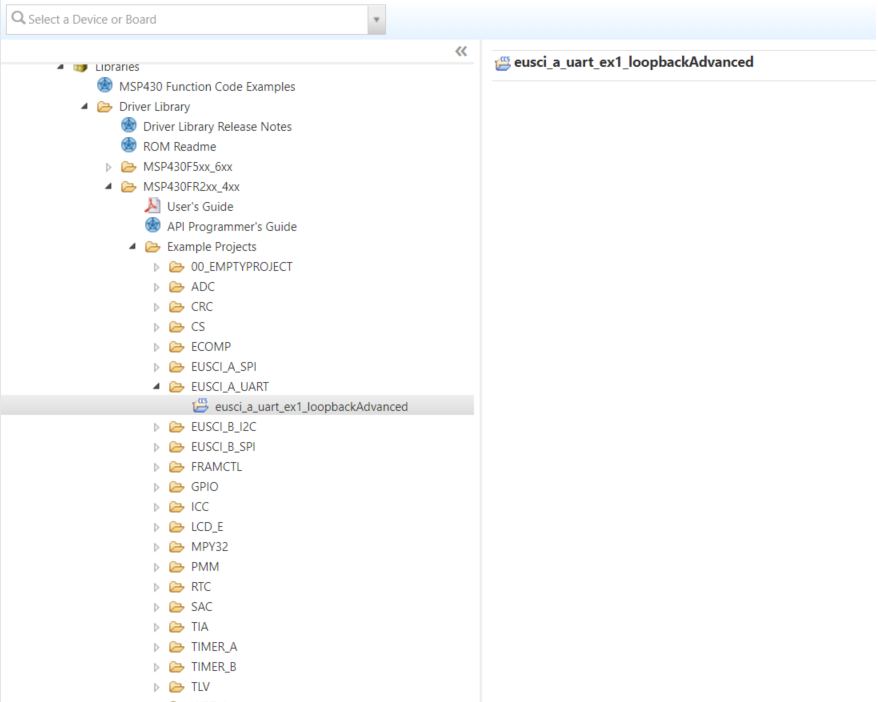
我正在寻找适用于 msp430fr2153和 msp430fr2355的 UART 驱动程序。 我已经在 CCS v8.2中浏览了 Resource Explorer、我只找到了驱动程序的用户指南、但在驱动程序上没有找到任何示例。
B.R.
古拉夫
您好!
我正在寻找适用于 msp430fr2153和 msp430fr2355的 UART 驱动程序。 我已经在 CCS v8.2中浏览了 Resource Explorer、我只找到了驱动程序的用户指南、但在驱动程序上没有找到任何示例。
B.R.
古拉夫