

Other Parts Discussed in Thread: MSP430I2021, MSP430G2553, MSP-EM-DESIGN-CENTER, MSP430I2041
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430I2021 主题中讨论的其他器件: MSP430G2553、 MSP-EM-DESIGN-CENTER、 MSP430I2041
您好!
通过 MSP-FETFlash 仿真工具编程的启动代码和应用代码、发现不跳转到 App.found checkusm 验证为 true、应用程序复位矢量() 0xFbFE)正常。
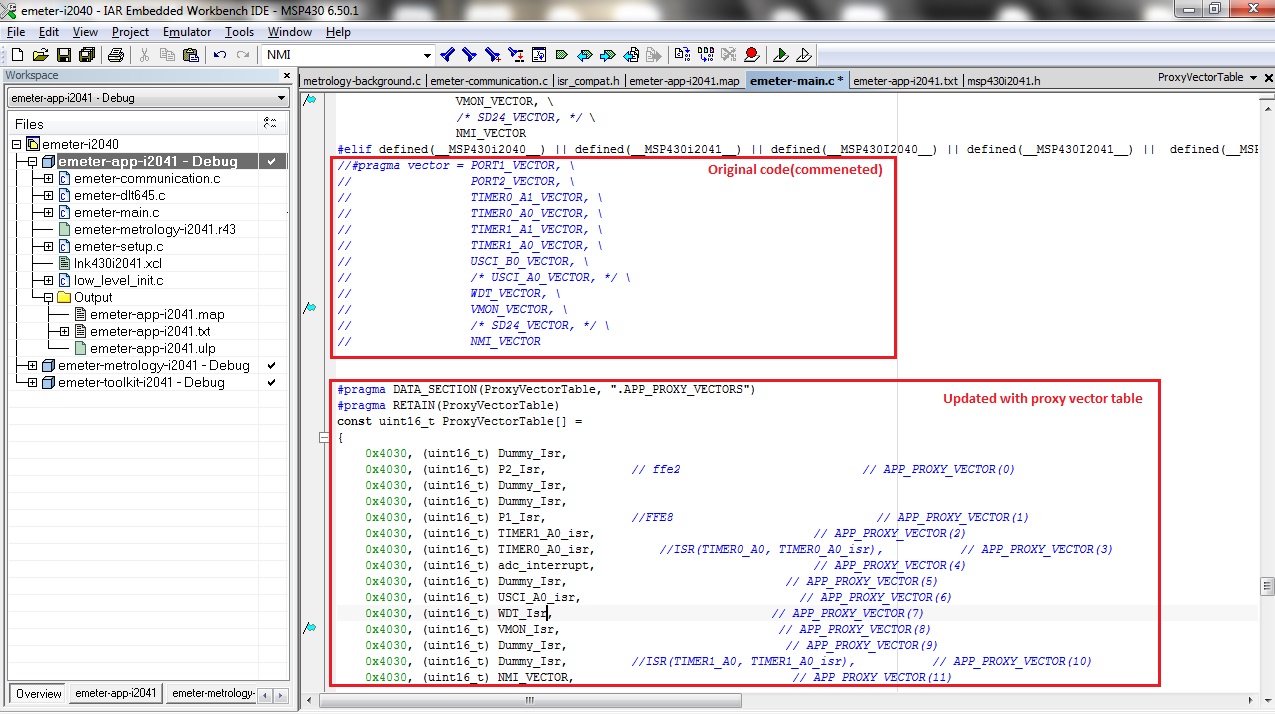
已连接应用链接器(lnk430i2041.xcl)、启动链接器(lnk_msp430I20XX_UART_1KB_Boot.xcl)和应用程序的输出文件(emeter-app-i2021/txt)。 如需更多信息、请告诉我。


{kind=link}