请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430F5529 您好!
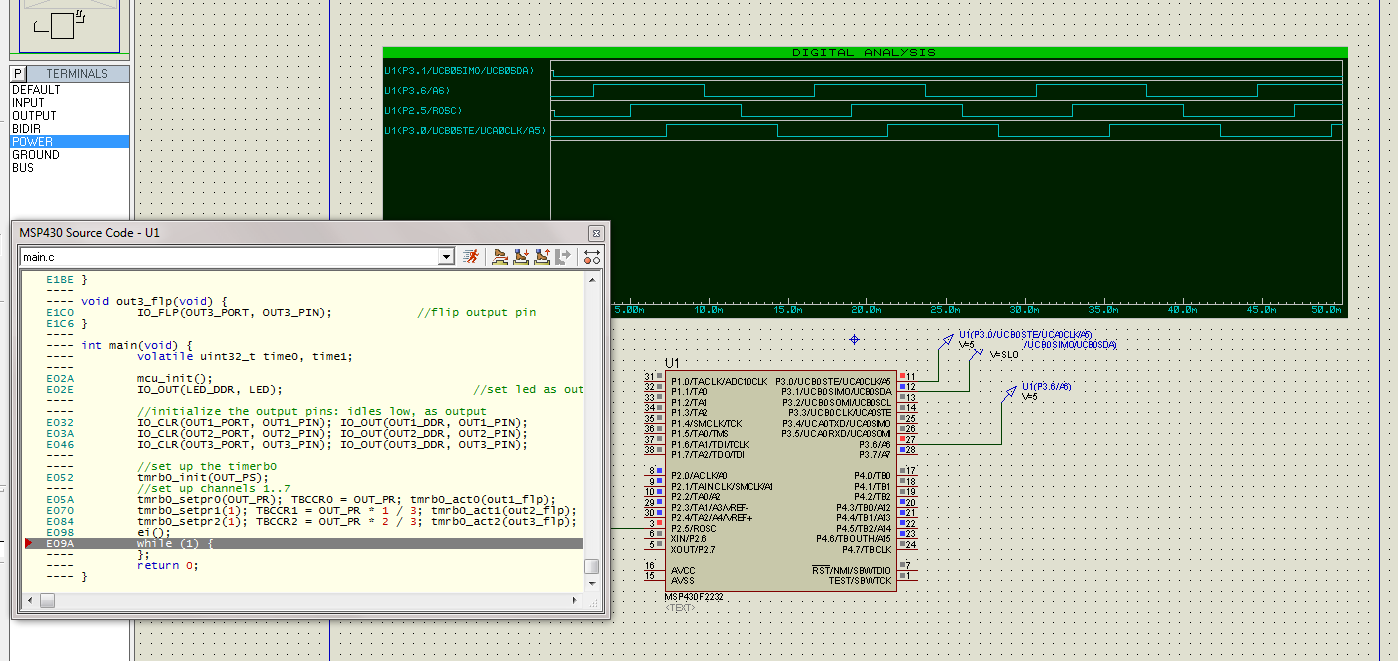
我正在尝试生成5个方波、它们之间的偏移为72度。 我在比较模式下使用计时器 B。 我的问题是我无法初始化输出引脚的初始状态。 我希望其中两个信号从低电平开始、其他三个信号从高电平开始、以便能够实现所需的相移。
谢谢
Nitish
您好!
我正在尝试生成5个方波、它们之间的偏移为72度。 我在比较模式下使用计时器 B。 我的问题是我无法初始化输出引脚的初始状态。 我希望其中两个信号从低电平开始、其他三个信号从高电平开始、以便能够实现所需的相移。
谢谢
Nitish