Other Parts Discussed in Thread: LDC1041
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LDC1041EVM
工具/软件:Code Composer Studio
您好!
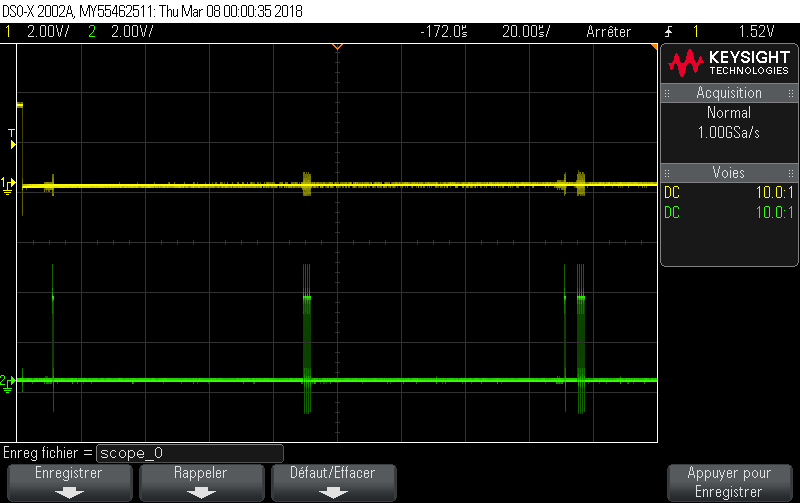
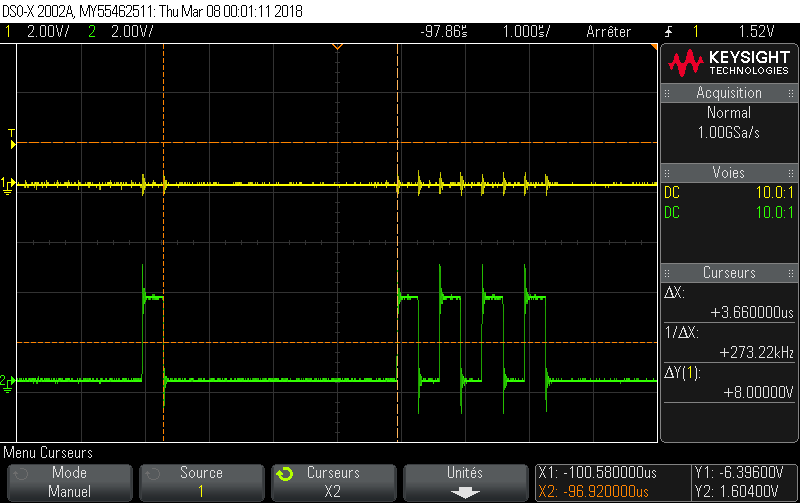
我正在尝试将 LDC1041EVM 与寄存器级的 MSP432P401R 搭配使用。 我面临一个问题:我首先尝试获取器件的 ID (通过 defaut 获取0x84)。 为此、我将向 LDC1041发送0x80、它对应于要读取的代码、然后是寄存器的地址。 我可以检查我的要求是否正确、但我没有 LDC1041的任何答案。
我曾尝试对 CSB 进行编程,但它一直到很早:这是否是问题的原因? 它不能随时位于地面上?
另一个想法是、当我只需要 ID 时、我不会为 TBCLK 引脚上的 LDC1041提供任何频率。 器件是否绝对需要频率才能工作?
提前感谢您
S.D.