请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR6043 主题中讨论的其他器件:EVM430-FR6043
社区您好。
我使用 EVM430-FR6043板通过 Timer_A1模块创建 PWM。
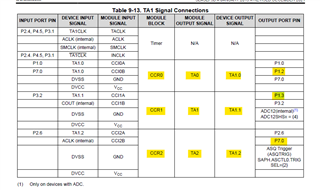
Timer_A1模块具有 TA1.0、TA1.1和 TA1.2引脚。
用于 TA1.0的 P1.2、用于 TA1.1的 P1.3以及用于 TA1.2的 P7.0
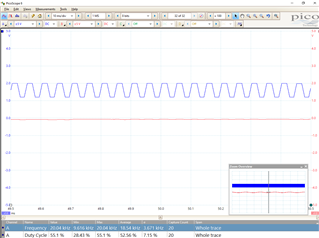
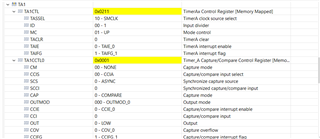
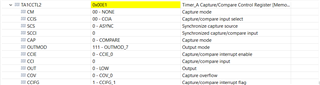
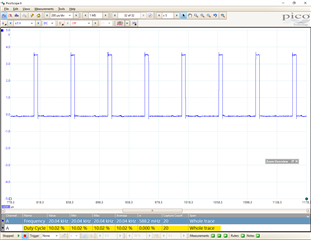
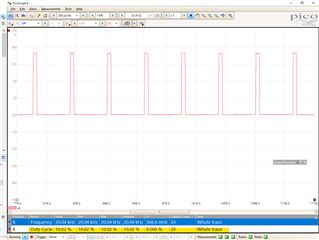
我读取示例代码以使用 Timer_A1生成两个 PWM、但无法生成正确的 PWM。
仅在 TA1.1 (P1.3)中发生 PWM 生成、占空比不正确。 我将提供占空比值、但创建的占空比值不同。
我附上了我的代码供您参考。 请帮助我解决此问题。
#include <msp430.h>
#include "timer_a.h"
#define TIMER_PERIOD 49
#define DUTY_CYCLE1 5
#define DUTY_CYCLE2 5
Timer_A_initCompareModeParam pwm_gen_0;
Timer_A_initCompareModeParam pwm_gen_1;
Timer_A_initUpModeParam pwm_up;
/**
* main.c
*/
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // Stop WDT
// Configure GPIO
P1DIR |= BIT2; // P1.2 as output
P1DIR |= BIT3; // P1.3 as output
P7DIR |= BIT0; // P7.0 as output
P1SEL1 |= BIT2; // P1.2,P1.3 and P7.0 options select
P1SEL1 |= BIT3;
P7SEL1 |= BIT0;
// Disable the GPIO power-on default high-impedance mode to activate
// previously configured port settings
PM5CTL0 &= ~LOCKLPM5;
CSCTL0_H = CSKEY_H; // Unlock CS registers
CSCTL1 = DCOFSEL_6; // Set DCO = 8MHz
CSCTL2 = SELA__VLOCLK | SELS__DCOCLK | SELM__DCOCLK;// Set ACLK=VLO SMCLK=DCO
CSCTL3 = DIVA__8 | DIVS__8 | DIVM__8; // Set all dividers
CSCTL0_H = 0;
/*------- Timer A1------------*/
pwm_up.clockSource=TIMER_A_CLOCKSOURCE_SMCLK;
pwm_up.clockSourceDivider=TIMER_A_CLOCKSOURCE_DIVIDER_1;
pwm_up.timerPeriod=TIMER_PERIOD;
pwm_up.timerInterruptEnable_TAIE=TIMER_A_TAIE_INTERRUPT_DISABLE;
pwm_up.captureCompareInterruptEnable_CCR0_CCIE=TIMER_A_CCIE_CCR0_INTERRUPT_DISABLE;
pwm_up.timerClear=TIMER_A_DO_CLEAR;
pwm_up.startTimer=false;
pwm_gen_0.compareRegister=TIMER_A_CAPTURECOMPARE_REGISTER_1;
pwm_gen_0.compareInterruptEnable=TIMER_A_CAPTURECOMPARE_INTERRUPT_DISABLE;
pwm_gen_0.compareOutputMode=TIMER_A_OUTPUTMODE_RESET_SET;
pwm_gen_0.compareValue=DUTY_CYCLE1;
pwm_gen_1.compareRegister=TIMER_A_CAPTURECOMPARE_REGISTER_2;
pwm_gen_1.compareInterruptEnable=TIMER_A_CAPTURECOMPARE_INTERRUPT_DISABLE;
pwm_gen_1.compareOutputMode=TIMER_A_OUTPUTMODE_RESET_SET;
pwm_gen_1.compareValue=DUTY_CYCLE2;
Timer_A_initUpMode(TA1_BASE,&pwm_up);
Timer_A_initCompareMode(TA1_BASE,&pwm_gen_0);
Timer_A_initCompareMode(TA1_BASE,&pwm_gen_1);
Timer_A_startCounter(TA1_BASE,TIMER_A_UP_MODE);
return 0;
}
提前感谢、
萨尔沃特