Other Parts Discussed in Thread: MSP430FR2532, ENERGYTRACE
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2532 大家好!
我希望能找到解决我的问题的方法。
我使用的是 MSP430FR2532微控制器(定制设计板)和单个键盘传感器。
关于键盘传感器设计、我遵循了 TI 的设计指南。
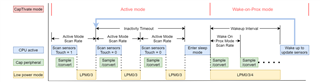
为了测试设计、我使用了 TI 在 CapTIvate 设计中心提供的超低功耗4按钮 FR2633代码(修改为单个按钮)。
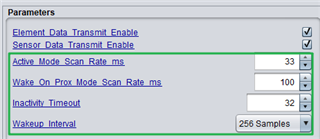
Touch 能够很好地使用代码中提供的默认参数、并且我正在尝试优化功耗。
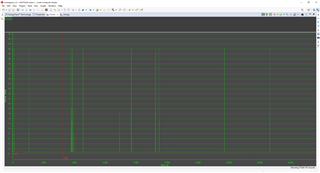
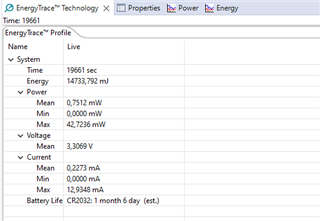
我正在使用 CapTIvate FR2633电能跟踪来检查功耗、我实现的最好方法是28天(采用 CR2032电池设置)。
参考 TI 文档、我预计需要3年(基于6uA i-avg/电极)、单按钮和接近唤醒功能以及外部晶体。
我可能缺少一些简单的东西、如果有一些关于如何解决的指导/步骤、我会很感激。 请告诉我您需要什么进一步的信息。
提前感谢。