


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2532 大家好!
我很难在 LED2保持运行的时间上增加延迟。
在以下代码中、没有出现延迟、一切正常、我得到了所需的消耗量。
#include <msp430.h> // Generic MSP430 Device Include
#include "driverlib.h" // MSPWare Driver Library
#include "captivate.h" // CapTIvate Touch Software Library
#include "CAPT_App.h" // CapTIvate Application Code
#include "CAPT_BSP.h" // CapTIvate EVM Board Support Package
void main(void)
{
//
// Initialize the MCU
// BSP_configureMCU() sets up the device IO and clocking
// The global interrupt enable is set to allow peripherals
// to wake the MCU.
//
WDTCTL = WDTPW | WDTHOLD;
BSP_configureMCU();
__bis_SR_register(GIE);
//
// Start the CapTIvate application
//
CAPT_appStart();
//
// Background Loop
//
while(1)
{
//
// Run the captivate application handler.
// Set LED1 while the app handler is running,
// and set LED2 if proximity is detected
// on any sensor.
//
LED1_ON;
if(CAPT_appHandler()==true)
LED2_ON;
else
LED2_OFF;
LED1_OFF;
//
// This is a great place to add in any
// background application code.
//
__no_operation();
//
// End of background loop iteration
// Go to sleep if there is nothing left to do
//
CAPT_appSleep();
} // End background loop
} // End main()
工程会成功构建;
但是、当我添加如下延迟(第94行)时、项目不会生成;
/* --COPYRIGHT--,BSD
* Copyright (c) 2017, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//*****************************************************************************
// Development main.c for MSP430FR2633, MSP430FR2533, MSP430FR2632, and
// MSP430FR2532.
//
// This starter application initializes the CapTIvate touch library
// for the touch panel specified by CAPT_UserConfig.c/.h via a call to
// CAPT_appStart(), which initializes and calibrates all sensors in the
// application, and starts the CapTIvate interval timer.
//
// Then, the capacitive touch interface is driven by calling the CapTIvate
// application handler, CAPT_appHandler(). The application handler manages
// whether the user interface (UI) is running in full active scan mode, or
// in a low-power wake-on-proximity mode.
//
// The CapTIvate application handler will return true if proximity was
// detected on any of the sensors in the application, which is used here
// to control the state of LED2. LED1 is set while the background loop enters
// the handler, and is cleared when the background loop leaves the handler.
//
// \version 1.83.00.05
// Released on May 15, 2020
//
//*****************************************************************************
#include <msp430.h> // Generic MSP430 Device Include
#include "driverlib.h" // MSPWare Driver Library
#include "captivate.h" // CapTIvate Touch Software Library
#include "CAPT_App.h" // CapTIvate Application Code
#include "CAPT_BSP.h" // CapTIvate EVM Board Support Package
void main(void)
{
//
// Initialize the MCU
// BSP_configureMCU() sets up the device IO and clocking
// The global interrupt enable is set to allow peripherals
// to wake the MCU.
//
WDTCTL = WDTPW | WDTHOLD;
BSP_configureMCU();
__bis_SR_register(GIE);
//
// Start the CapTIvate application
//
CAPT_appStart();
//
// Background Loop
//
while(1)
{
//
// Run the captivate application handler.
// Set LED1 while the app handler is running,
// and set LED2 if proximity is detected
// on any sensor.
//
LED1_ON;
if(CAPT_appHandler()==true)
LED2_ON;
// Add delay for 5 seconds
delay(5000000); // 5 seconds delay
else
LED2_OFF;
LED1_OFF;
//
// This is a great place to add in any
// background application code.
//
__no_operation();
//
// End of background loop iteration
// Go to sleep if there is nothing left to do
//
CAPT_appSleep();
} // End background loop
} // End main()
我在构建控制台中得到以下编译失败信息;
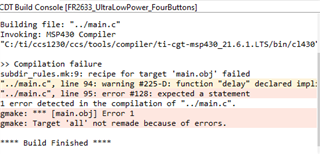
我们将感谢您提供任何支持/指导。 如果您需要任何进一步的信息、请告诉我。
