请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430F6777A 我使用的是 MSP430F6777A 微控制器。 SMCLK 的频率为25MHz。 我想切换 GPIO 引脚以驱动装配 LED。 对于此操作、我需要将 GPIO 引脚保持在高电平900ns、保持在低电平300ns。 循环和&&逻辑运算符的 IF 控制等操作会增加切换时间。 如何在不使用 PWM 模式下的计时器的情况下加快切换过程?
e2e.ti.com/.../AN1001_5F00_IC-Embedded-Solutions-of-SMD-LEDs-_2800_Ver-1.0_2900_.pdf
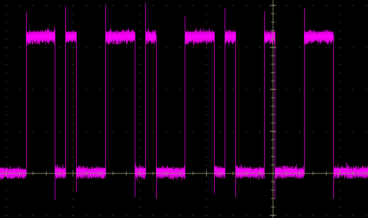
Toh=300ns
T0L=.00
T1H=.00
T1L= 300ns