请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2355 您好!
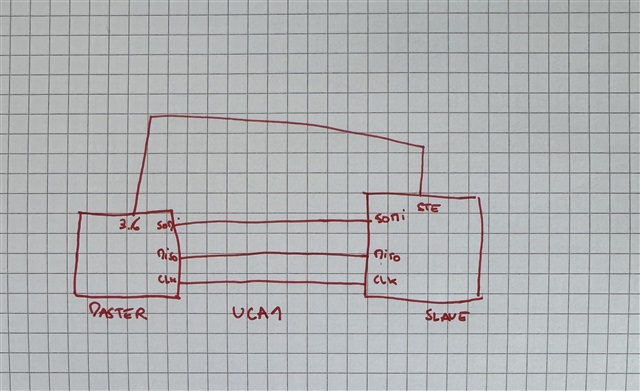
我想在两个 MSP430FR2355之间累积一个 SPI 通信。 我有一个主微控制器和五个从微控制器(所有微控制器均为 MSP430FR2355)。
我的主器件在3Wire 中进行 SPI 配置、我使用5个 IO 为芯片选择正确的从器件。 所有从器件都采用4线配置。
我的问题如下:
使用从 SPI (芯片选择低电平有效)的 MODE_2时、我无法发送和接收任何数据。 但是、当我使用 MODE_1 (芯片选择高电平有效)时、我可以发送和接收数据。 我的 IO 连接到 STE 引脚保持高电压在1.6V、即使我将 IO 配置为低电平。
使用这种类型的微控制器是否可以将 STE 连接到 IO?
//SLAVE SPI
#include <msp430.h>
#include "gpio.h"
int main(void)
{
WDTCTL = WDTPW|WDTHOLD; // Stop watchdog timer
//Configuration SPI pins on Hardawre
P4SEL0 |= BIT0 | BIT1 | BIT2 | BIT3; // set 4-SPI pin as second function
GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN3); //indication alimentation
GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN3);
GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN4); //indication reception
GPIO_setOutputLowOnPin(GPIO_PORT_P2, GPIO_PIN4);
UCA1CTLW0 |= UCSWRST; // **Put state machine in reset**
UCA1CTLW0 |= UCSYNC|UCMSB|UCMODE_1|UCSTEM; // 3-pin, 8-bit SPI slave
// Clock polarity high, MSB
UCA1CTLW0 |= UCSSEL__SMCLK; // ACLK
UCA1BR0 = 0x02; // BRCLK = ACLK/2
UCA1BR1 = 0; //
UCA1CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
PM5CTL0 &= ~LOCKLPM5; // Disable the GPIO power-on default high-impedance mode
// to activate previously configured port settings
UCA1IE |= UCRXIE; // Enable TX interrupt
__bis_SR_register(GIE); // Enter LPM0, enable interrupts
}
#pragma vector=USCI_A1_VECTOR
__interrupt void USCI_A1_ISR(void)
{ while (!(UCB1IFG&UCTXIFG)); // USCI_B1 TX buffer ready?
UCA1TXBUF = UCA1RXBUF; // Echo received data
GPIO_toggleOutputOnPin(GPIO_PORT_P2, GPIO_PIN4);
}
//MASTER SPI
#include <msp430.h>
#include "gpio.h"
/**
* main.c
*/
//3.6 CS
//UCA1 SPI
unsigned char TXData;
unsigned char RXData; // Holds TX data
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
P4SEL0 |= BIT3 | BIT2 | BIT1; // set 3-SPI pin as second function
GPIO_setAsOutputPin(GPIO_PORT_P3, GPIO_PIN6);
GPIO_setAsOutputPin(GPIO_PORT_P2, GPIO_PIN3);
UCA1CTLW0 |= UCSWRST; // **Put state machine in reset**
UCA1CTLW0 |= UCMST|UCSYNC|UCMSB; // 3-pin, 8-bit SPI master
// Clock polarity high, MSB
UCA1CTLW0 |= UCSSEL__SMCLK; // Select SMCLK
UCA1BR0 = 0x02; // BRCLK = SMCLK/2
UCA1BR1 = 0; //
UCA1CTLW0 &= ~UCSWRST; // **Initialize USCI state machine**
TXData = 0x01; // Holds TX data
PM5CTL0 &= ~LOCKLPM5;
GPIO_setOutputHighOnPin(GPIO_PORT_P2, GPIO_PIN3);
//GPIO_setOutputHighOnPin(GPIO_PORT_P3, GPIO_PIN6);
while(1)
{
UCA1IE |= UCTXIE; // Enable TX interrupt
__bis_SR_register(GIE); // enable global interrupts, enter LPM0
__no_operation(); // For debug,Remain in LPM0
__delay_cycles(10000); // Delay before next transmission
TXData++; // Increment transmit data
}
}
#pragma vector=USCI_A1_VECTOR
__interrupt void USCI_A1_ISR(void)
{
switch(__even_in_range(UCA1IV,USCI_SPI_UCTXIFG))
{
case USCI_NONE: break; // Vector 0 - no interrupt
case USCI_SPI_UCRXIFG:
RXData = UCA1RXBUF;
UCA1IFG &= ~UCRXIFG;
break;
case USCI_SPI_UCTXIFG:
GPIO_setOutputLowOnPin(GPIO_PORT_P3, GPIO_PIN6);
UCA1TXBUF = TXData; // Transmit characters
GPIO_setOutputHighOnPin(GPIO_PORT_P3, GPIO_PIN6);
UCA1IE &= ~UCTXIE;
break;
default: break;
}
}