

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430G2553 工具与软件:
您好:
提前感谢您提供的任何帮助。 我在 MSP-EXP430G2 Launchpad 开发套件上运行一个应用、但使用的是较旧的 CircuitCo 教育版 BoosterPack。 应用程序使用霍尔效应传感器来确定主轴的速度、并在我调试应用时将其显示在 BoosterPack LCD 上、但当我退出调试器时、LCD 上显示的最后一位信息会在退出之前保留、并且主轴速度不会更新。 当我移除仿真板的跳线并通过 J6从外部电源为器件供电时、该应用也无法正常工作。 上电后、我必须按下复位按钮、然后只能看到开始启动界面、不显示主轴速度。
我已经查看过各种论坛中的一些使用调试器运行代码的示例、而不是在调试器关闭时运行代码、但我在这些示例中看不到与我的情况相关的内容。
您对如何解决此问题有什么建议吗? 再次感谢。
设置:
Code Composer Studio 版本:11.1.0.00011、运行 Windows 10的 PC。
观看安装在 launchpad 板上的晶体并移除 EDU BoosterPack 上的白色 LED (我将使用该引脚13作为霍尔效应传感器电路的输入)。
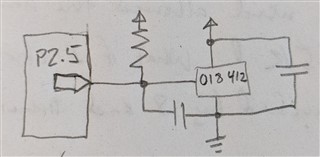
霍尔效应传感器电路。
和我的代码。
#include <msp430.h>
#include <string.h>
#include <stdio.h>
#include <stdint.h>
#include <intrinsics.h>
#define EBP_CS BIT0 //chip select
#define EBP_CLK BIT5 //clock
#define EBP_MOSI BIT7 //data line
#define EBP_RS BIT3 //command vs data
#define SENSOR_PIN BIT5 //attach key to P2_5 TA1.2
#define AFTER_BUSY_DELAY 40 //used to wait additional time after UCBUSY clears
void InitBPLCD(void);
void InitSPI(void);
void InitPorts(void);
void InitHallSensor(void);
void itoa(long unsigned int value, char *result, unsigned int base);
unsigned int WriteCommand(unsigned int cmd);
void WriteData(void);
void ClearHome(void);
void SetRowLine(unsigned int row, unsigned int line);
char charsToLCD[32] = {'\0'};
uint32_t timerDiff = 0;
uint8_t computeSpeed = 0;
uint8_t speedCount = 0;
volatile unsigned int cntOvrFloTAR = 0;
volatile unsigned int sendData = 0;
volatile uint16_t currTimerCounts = 4;
volatile uint16_t prevTimerCounts = 0;
/**
* main.c
*/
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
//set up Basic Clock Module
BCSCTL1 |= DIVA_3; //this write clears all other bits; divide ACLK/8
BCSCTL3 |= XCAP_3; //sets internal capacitance for watch crystal
InitPorts();
InitSPI();
InitHallSensor();
InitBPLCD();
__delay_cycles(1000);
strcpy(charsToLCD, "0123456789012345testing testing!");
WriteData();
__delay_cycles(1000);
//Set up Timer1A
// capture on rising edge, CCI2B input, synchronous cap, capture mode, ints enabled
TA1CCTL2 = CM_1 | CCIS_1 | SCS | CAP | CCIE;
// Continuous, divide clock by 1, ACLK, clear, enable
TA1CTL = MC_2 | ID_0 | TASSEL_1 | TACLR | TAIE;
__enable_interrupt();
for(;;){
// do nothing
if (computeSpeed > 0){
computeSpeed = 0;
timerDiff = currTimerCounts - prevTimerCounts;
//clear buffer
charsToLCD[0] = '\0';
itoa(timerDiff, charsToLCD, 10);
WriteData();
}
/*
if (sendData == 2)
{
sendData = 0;
charsToLCD[0] = '\0';
strcpy(charsToLCD, "0123456789012345running testing!");
WriteData();
}
*/
}
return 0;
}
#pragma vector = TIMER1_A1_VECTOR
__interrupt void TIMER1_A1_ISR (void){
switch (__even_in_range(TA1IV, 10)){
case 0:
break;
case TA1IV_TACCR2:
TA1CCTL2 &= ~CCIE; // disable further CCIE interrupts
prevTimerCounts = currTimerCounts;
currTimerCounts = TA1CCR2;
++speedCount;
if (speedCount > 3){
computeSpeed = 1;
speedCount = 0;
}
cntOvrFloTAR = 0; //reset TAR rollover counter
TA1CCTL2 &= ~CCIFG; // clear the CCRO flag
TA1CCTL2 |= CCIE; //enable interrupts
break;
case TA1IV_TAIFG:
++cntOvrFloTAR;
/*if (cntOvrFloTAR > 2){ // been idle
//set flag to go to sleep
cntOvrFloTAR = 0;
sendData = 2;
}else{
sendData = 1;
}*/
break;
default:
for (;;){
//Should not be possible
}
}
}
void InitBPLCD(void){ //copying bp_LCD.cpp from Energia sketch
WriteCommand(0x30); //function set
__delay_cycles(27);
WriteCommand(0x30); //function set
__delay_cycles(27);
WriteCommand(0x30); //function set
__delay_cycles(27);
WriteCommand(0x14); //cursor/display shift
__delay_cycles(27);
WriteCommand(0x0c); //display on/off
__delay_cycles(27);
WriteCommand(0x06); //entry mode set
__delay_cycles(27);
WriteCommand(0x39); //function set (2 lines, instruction table 1)
__delay_cycles(27);
ClearHome(); //clear
WriteCommand(0x57); //power/ICON control/contrast set upper bits
__delay_cycles(27);
WriteCommand(0x6b); //follower control
__delay_cycles(27);
WriteCommand(0x72); //contrast set lower bits
__delay_cycles(1000);
}
unsigned int WriteCommand(unsigned int cmd){
if (UC0IFG & UCB0TXIFG){ //ready for new data?
P2OUT &= ~(EBP_RS + EBP_CS); // need to clear _SS and RS LOW for command
__delay_cycles(10);
UCB0TXBUF = cmd; //begin transaction
while(UCB0STAT & UCBUSY); //wait for transfer to finish
__delay_cycles(AFTER_BUSY_DELAY);
P2OUT |= EBP_RS + EBP_CS;
}
__delay_cycles(5);
return 1;
}
void ClearHome(void){
unsigned int wait = WriteCommand(0x01);
if (wait == 1){
WriteCommand(0x02);
}
}
void WriteData(void){
ClearHome();
SetRowLine(0,0);
char *ptr_lcdUp = charsToLCD;
char *ptr_lcdLow = charsToLCD + 16;
unsigned int i;
for(i = 0; i < 16 && *ptr_lcdUp != '\0'; ++i, ++ptr_lcdUp){
if (UC0IFG & UCB0TXIFG){ //ready for new data?
P2OUT &= ~EBP_CS;
__delay_cycles(10);
UCB0TXBUF = *ptr_lcdUp; //load shift register for transfer
while(UCB0STAT & UCBUSY); //wait for transfer to finish
__delay_cycles(AFTER_BUSY_DELAY);
P2OUT |= EBP_CS; // need to set _SS HIGH
}
}
SetRowLine(0,1);
for(i = 0; i < 16 && *ptr_lcdLow != '\0'; ++i, ++ptr_lcdLow){
if (UC0IFG & UCB0TXIFG){ //ready for new data?
P2OUT &= ~EBP_CS;
__delay_cycles(10);
UCB0TXBUF = *ptr_lcdLow; //load shift register for transfer
while(UCB0STAT & UCBUSY); //wait for transfer to finish
__delay_cycles(AFTER_BUSY_DELAY);
P2OUT |= EBP_CS; // need to set _SS HIGH
}
}
}
void SetRowLine(unsigned int row, unsigned int line){
//NewHaven LCD with 2 lines 16 rows, expect line (0,1) row (0,15)
if ((row < 16) && (line < 2))
WriteCommand(0x80 | (line * 0x40) | row);
}
void InitSPI(void){
P2OUT |= (EBP_CS | EBP_RS); //start off high (
P1SEL |= (EBP_CLK | EBP_MOSI); //select primary peripheral USCI_B
P1SEL2 = (EBP_CLK | EBP_MOSI);
//SPI mode 3 needs CPOL=CKPL=1, CPHA=1 -> CKPH=0; msb first, master,
//8 bit (default), 3-wire (default, mode 0), synchronous
UCB0CTL0 = UCCKPH | UCMSB | UCMST | UCMODE_0 | UCSYNC;
UCB0CTL1 = UCSSEL1 | UCSWRST; //clock from SMCLK; hold in reset
UCB0BR1 = 0; //upper byte of divider word
UCB0BR0 = 60; //Clock = SMCLK/60 = 100KHz
UCB0STAT = UCLISTEN; //Internal loopback; try this since no MISO pin
UCB0CTL1 &= ~UCSWRST; //release from reset
}
void InitPorts(void){
P1OUT = 0;
P1DIR = 0xFF;
P2OUT = 0;
P2DIR = 0xFF;
}
void InitHallSensor(void){
P2DIR &= ~SENSOR_PIN; //Set pin as input
P2SEL |= SENSOR_PIN; //Set pin for Timer1_A CCI1A capture
}
void itoa(long unsigned int value, char* result, unsigned int base){
// check that the base is legit
if (base < 2 || base > 36) { *result = '\0';}
char *ptr = result, *ptr1 = result, tmp_char;
unsigned int tmp_value;
do{
tmp_value = value;
value /= base;
*ptr++ = "zyxwvutsrqponmlkjihgfedcba9876543210123456789abcdefghijklmnopqrstuvwxyz" [35 + (tmp_value - value * base)];
} while (value);
//Apply negative sign
if(tmp_value < 0) *ptr++ = '-';
*ptr-- = '\0';
while(ptr1 < ptr){
tmp_char = *ptr;
*ptr-- = *ptr1;
*ptr1++ = tmp_char;
}
}
