Other Parts Discussed in Thread: MSP430FR5987
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR5987 工具与软件:
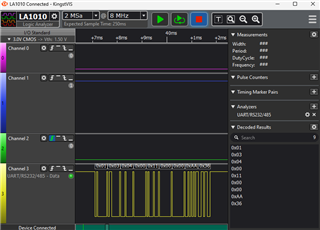
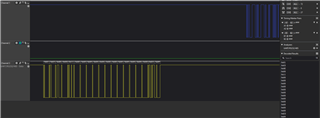
我将从 Modbus 系统中截取数据。 我可以使用逻辑分析仪看到该价值、但它没有出现串行终端。
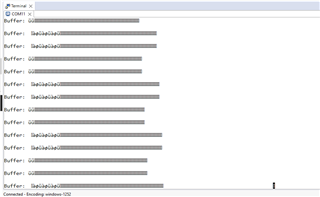
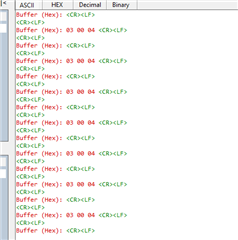
我尝试打印正常的字符串它正在工作,但缓冲区中的数据永远不会到串行终端?
请多多指教。 我所使用的芯片 MSP430FR5987已插入适用于特定项目的电路中。 Im 使用19200波特率、是否是在串行终端中未获取这些缓冲值的原因?
我 观看了 一个视频教程、其中提到如果我想使用高于9600的波特率、我必须 使用 USB 到 UART 转换器(FT232RL)。
寻找您的宝贵建议和建议。
谢谢