请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC2650 主题中讨论的其他器件: CC2650、 CC2640
大家好!
我使用的是 Launchxl-CC2650。
BLE SDK 2_02_07_06
TI RTOS 2.21.1.08
CCS7.4
编译器 TI Ver.5.2.6。
我已经在 uart_echo 示例代码中添加了看门狗驱动程序的代码。
我可以看到 UART 可以成功在串行端口上打印。
CC2650也会在看门狗计时器到期时重新启动。
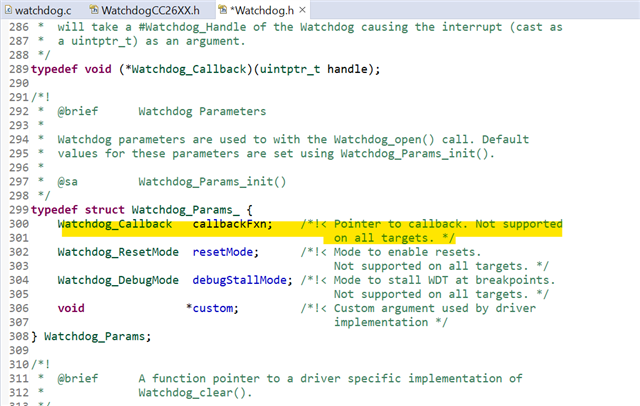
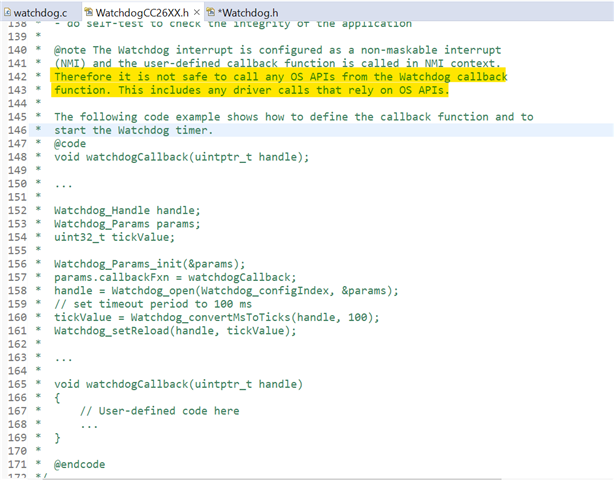
我正在对看门狗回调函数中的 UART 端口进行写入、但未调用该函数。
请帮助
谢谢!
D·萨尔维