请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:UCC27288 “线程: 测试”中讨论的其它部件
下午好,
几周以来,我一直在努力实施 UCC27288DR 门驱动器,以驱动 IPP200N15N3 MOSFET,用于三相电动机驱动器。 控制装置工作正常,电动机运行成功,但闸门驱动器很快就会发热(~15秒),几次使用后会迅速损坏自己。
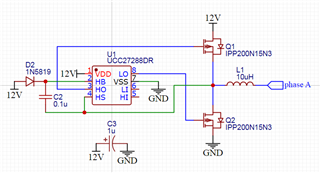
我已经将我的电路(下图所附)与 TI 提供的 UCC27288EVM 开发板进行了比较,我看不到任何可能导致电路过早故障的主要原因。
以下是一些注释:
电机是一 个 FANUC 伺服电机。 额定功率为200W (54V,电流约为3-4安培)。 正如电路附图所示,我以12伏的电压运行电路,并使用与栅极驱动器相同的电源。
关于驾驶员的工作频率,我目前没有执行任何高速 PWM 控制。 电机每转有4个换向循环,只有当反馈编码器记录到角度变化为15度时,驱动器才会发生变化。 根据我的观察,电动机以大约300 rpm 的转速旋转,因此每个栅极驱动器都能看到大约40Hz 的输入信号。
我目前在一个试验电路板上连接了这种电缆,我认为这是可以接受的,因为它是以低频率运行的。
电源设备是计算机的 PSU。 12伏导轨每条线路可处理高达4.2安的电流。 我曾尝试向栅极驱动器和 MOSFET 提供单独的导轨,但这没有帮助。
我已探测到 HO/LO 引脚,但我确实看到过,HO 引脚 不是从关闭到打开的清晰转换。 但是,我似乎不能明白为什么这样做。 我认为这可能是一个电源问题,但电流额定值对于驱动器来说应该足够多。
如果技术支持能加快解决这一问题,我将很高兴找到正确的解决方案。 在所附的我当前使用的电路照片中,我只显示了电机驱动器的1相位。 电路在总共3个相位中重复2次,与所附照片相同。
此致,
罗伯特