

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR5994 主题中讨论的其他器件:MSP430FR5962、 HALCOGEN、 CODECOMPOSER
我测试了连接到 BQ79600和 MSP430 (定制 PCB 上的 SPI 接口)的3个定制 BQ79616 MBB 菊花链。 其中一个 MBB (菊花链中间的器件2)在过去的 ESD 测试中损坏了 COMH 接口。 当 MBBS 堆栈连接到 BQ GUI 时,将检测到正确数量的正常运行的堆栈设备,并且自动寻址序列完成。 然而、只有当提供了正常运行的电路板数量时、MSP430固件才完成自动寻址。 如果 TOTALBOARDS 包括 COMH 接口损坏的 MBB、MISO 线路无活动、保持在0xff。 我不知道 BQ79616中缺少任何寄存器设置。 我可以做些什么来进一步解决这个问题--我没有将跳线焊接到 MBB 的 COML 线路上。
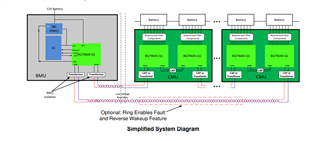
当堆栈包含 COMH 接口损坏的 MBB 时、唤醒似乎正确完成。 SPI_RDY 变为高电平有效、然后自动寻址不再继续。

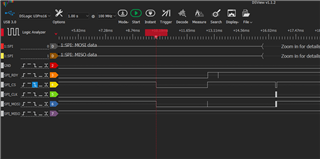
随附的是在 TOTALBOARDS 设置为3 (2个完全有效的 MBB)的情况下自动地址成功完成时的屏幕截图。
