请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCD3138A 主题中讨论的其他器件: UCD3138、 UCD3138064、
您好!
我使用的是 UCD3138ACCEVM149、可用于驱动 LLC 电路。
我从培训实验3中修改了演示程序。
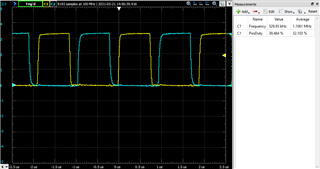
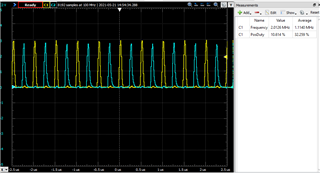
通过更改 cpusample 值、我可以看到输出 PWM 信号从500kHz 变为2MHz、这正是我所期望的(PWM0模块)。
而问题是什么
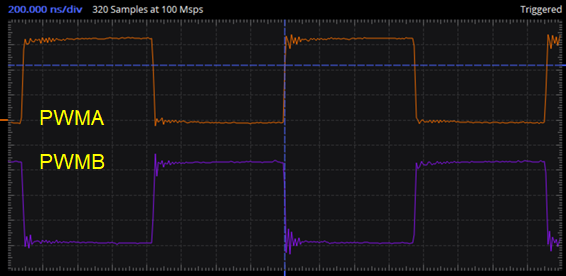
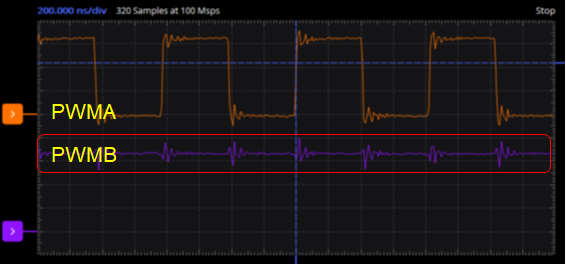
PWM0A 引脚始终正常、
但 PWM0B 有时是良好的、有时是高电平。
我的意思是、在500kHz ~ 2MHz 的频率下、Pwm0B 在某些频率下是良好的、但在其他频率下输出 HI 电平。
我很困惑、
请您就原因向我提供一些建议吗?
非常感谢!
吴晓峰