This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/power-management-group/power-management/f/power-management-forum/1162210/tps548b22-vout-drop-during-startup
尊敬的团队:
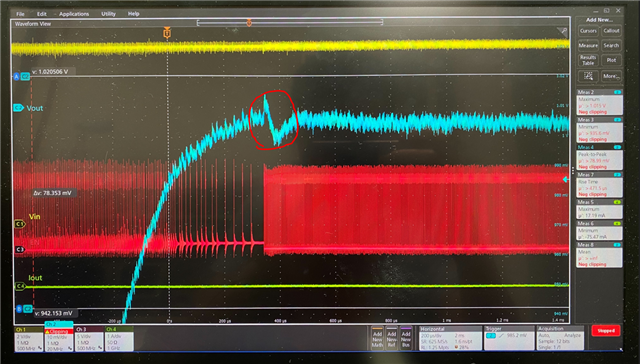
您能否帮助检查当输出电压接近我们的设计目标时器件为何有振铃?
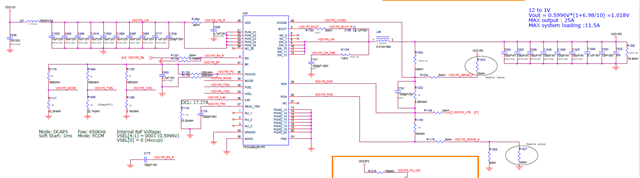
附件是供您参考的波形和原理图。 谢谢。
此致、
本
您好 Ben、
这是我对此的初始接受
我看到过冲、而不是下冲。 您能否尝试减少软启动、看看这是否有助于减少过冲。
对 SCH 的一些评论:
谢谢!
Tahar
您好、Tahar、
我会从我的角度尝试一下、看看是否有任何改进。
我将详细了解启动期间的 PWM 行为、您能否与我分享器件在启动期间的工作原理?
Ben、
我目前正在旅行,今天稍后我会作出回应。
高 VOUT 纹波和数据表中的遥感说明的结合让我有一点担心。
是否有额外的离线原理图输出电容位于负载的本地并且未显示在您发送的原理图中?
VOUT 从原理图上显示的本地输出电容路由到遥感负载的距离有多远?
本国
在启动期间、TPS548B22在断续导通"自动跳跃"(DCM)模式下运行、即使在引脚捆绑以进入强制连续导通模式(FCCM)时也是如此。 这旨在防止转换器从预偏置输出电压吸收电流。 但是、看看您共享的波形、看起来部件是突发的。 也就是说、该器件会发送几个间隔很近的导通时间脉冲、然后是较长的关断时间。 这不是在输出电压控制环路中发出的信号、通常是电感器本地输出电压与遥感输出电压之间的传输延迟。
恒定导通时间控制理论
恒定导通时间(COT)控制是脉冲频率调制控制的一种形式。 "控制 FET"(降压转换器中的高侧 FET)在预先确定的"固定"时间长度内导通、向输出端传输能量、然后关断、直到输出端的能量衰减、反馈检测到 VOUT 上的低电压、 这会触发新的导通时间。
出现了什么问题
但是、如果开关节点/电感器和感应输出电压之间存在较长的传播或传输延迟、则感应的输出电压在导通时间脉冲之后可能没有足够的上升、以防止转换器提供另一个导通时间。 转换器会切换几次、将输出电压升高、直到感应到的输出电压足够高、不会触发新的导通时间、 但是、由于电感器和传感输出的传输路径中积累了大量能量、因此需要较长的非开关周期才能衰减回稳压电压。 结果是多次开关脉冲"突发"、之后是较长的关断时间和高输出电压纹波。
当 TPS548B22在软启动结束时切换到强制连续导通模式时、转换器可能会突然吸收输出电流。 它向下拉 Vout、然后恢复到调节状态。
我们可以做些什么来测试它?
确认远程感应问题的最简单方法是将远程感应禁用为实验。 尝试移除 VOUT 和 GND 遥感电阻器 R1233和 R1227、并将输出电压感测转换为本地感测。 是的、这将降低输出电压、因为它将不再补偿 VOUT 的额外压降、但如果消除了该问题、我们知道问题的根源。 如果问题未得到解决、那么远程感应并不是问题的唯一来源、我们可以查看其他可能的选项。
如果这成功解决了这个问题、我们可以进行调整、将 R1254更改为电容器、将 R1233更改为10Ω Ω、以便我们可以远程感应直流输出电压、但在不增加传输延迟的情况下在本地关闭高频环路、以防止突发效应。
其他原理图注释:
遥感中使用了很多电阻器、虽然不是问题、但其中一些电阻器似乎放置不正确。 R1200和 R1227都是零欧姆电阻器(通常为20 50mΩ)、可连接到两个不同的接地位置。 这可能会感应接地环路。 假设 R1200用于局部感应、R1227用于遥感、R1200应像 R1158那样为10Ω Ω。 如果 R1200不是本地接地感测、而是两种远程接地感测中的一种、则它们之间应具有1Ω Ω 或10Ω Ω 的平衡电阻、以限制反馈感测中的电流和接地环路。
如果电路板将被中继出去、 我建议更改 R1158的连接、以便 R1170直接连接到 RSP 引脚网络、R1158在10Ω Ω 处连接到 TPS548B22附近的输出旁路电容器的本地接地端、R1170连接到遥感电阻器、 与 R1254连接到本地 VOUT 和 VOSNS 引脚的方式类似、R1234连接到遥感器。
注:
如果将遥感电阻器更改为10Ω Ω、则应将本地感测电阻器(如果使用)更改为100Ω Ω(或电容器)、以便稳压器在很大程度上倾向于使用遥感电压。
我正在将此主题的状态更改为等待客户、请让 Tahar Allag 和我知道、一旦您有机会运行我们提供的测试、它们是如何工作的。