请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
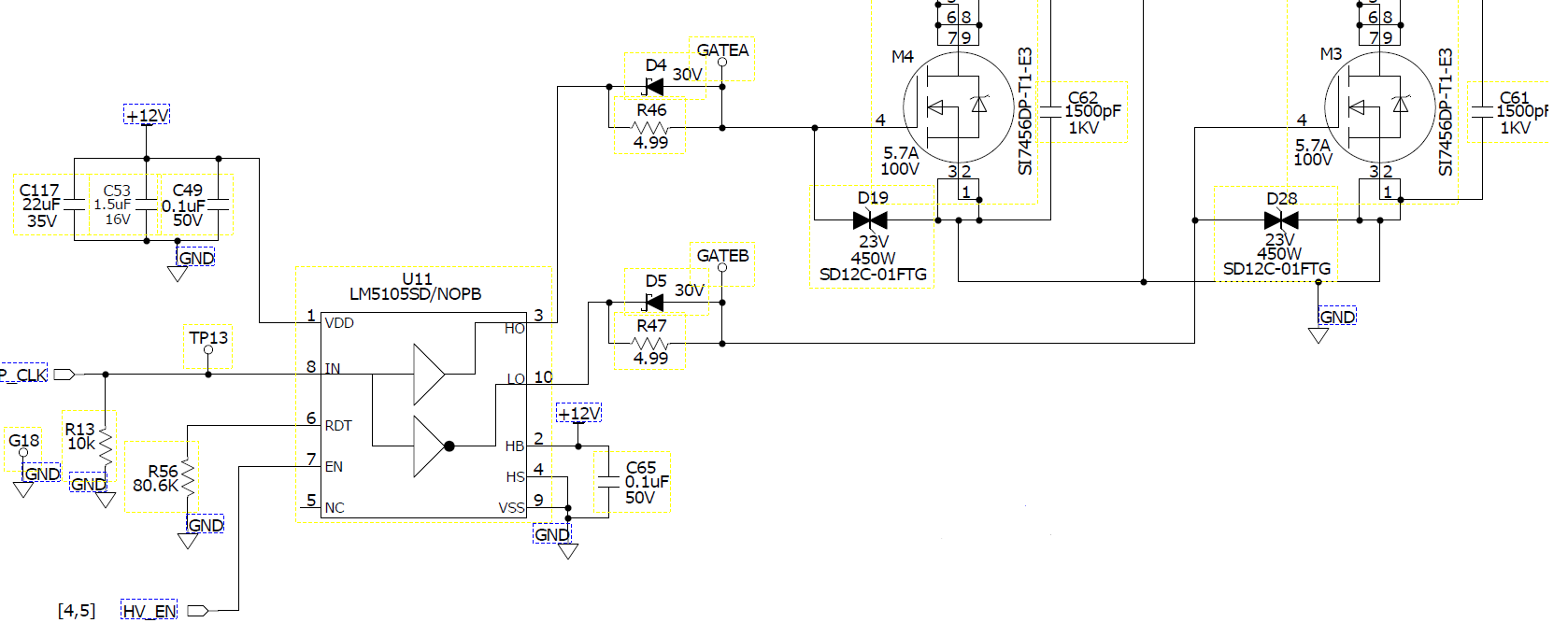
器件型号:LM5105 主题中讨论的其他器件: LM5101、 UCC27282、 LM5106
基础知识:
工作频率为125kHz
VDD 和 HB 为+12V
问题说明:
470ns 至520ns 时钟的下降沿跟踪 HO 引脚的下降沿、并将它们之间的传播延迟从60ns 增加到68ns。 这对我们来说不是问题、LO 引脚上的结果几乎相同。 我们目前的工作时间不低于470ns。
一旦超过520ns 阈值、HO 引脚的下降沿"卡回"、如视频所示、现在所有增加的占空比都具有26ns 的恒定传播延迟。
这对我们来说是一个问题、会导致运行和环路调优出现严重的不稳定性。
我在这里放置了一个视频、但它看起来不正确。 如果您看不到视频、请告诉我、以及如何获得视频。 如果可以的话、我可以创建一个分接框链接。
此外、我还限制了您的数据量、以帮助防止信息过载。 请告诉我您可能需要的任何其他详细信息、我很乐意提供这些信息。