请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TPS546D24A 你(们)好。
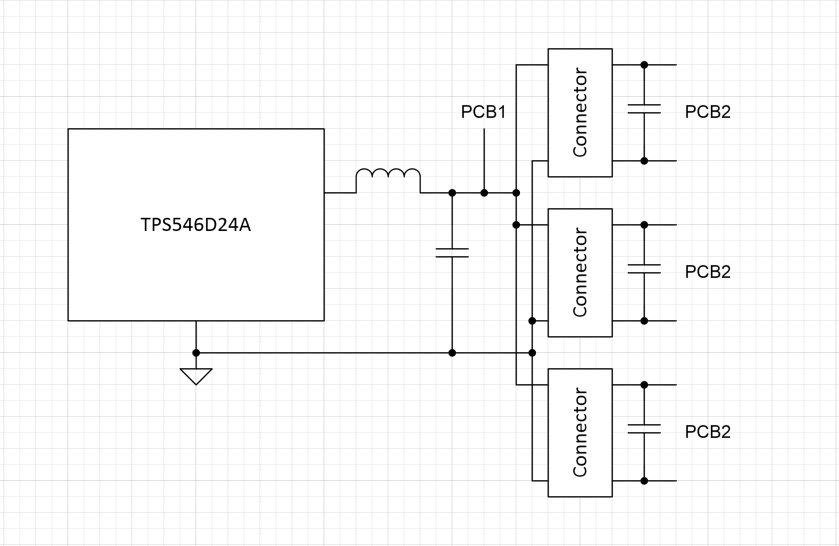
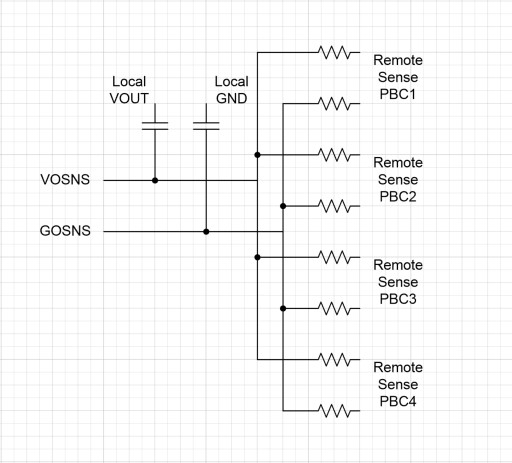
进行了比较。 输出电压将穿过4个 PCB 板和3个连接器。 距离约为50cm。 我想知道、可以将 senseN 和 senseP 连接到终端设备。 内部连接组件是否可以使环路稳定。 如果不是。 我能否添加运算放大器来反馈 SENSEN 和 SENSEP 以提高稳定性?
输出电压范围为:1.2V 至4V
最大电流为:30A
最大输出电压纹波为:+-100mV
如果您有任何参考资料或类似案例、请告诉我。
此致、
Ricardo