请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM6442 工具/软件:
您好:
我想确认哪些信息是正确的。
*根据数据表,有以下两个规格。 

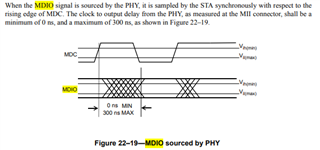
从数据表中、我知道 MAC 侧的 MDIO 读取值基于 MDC 上升沿锁存。
但是、根据 MDIO 的 Linux 驱动程序、读取值似乎根据 MDC 下降沿锁存。 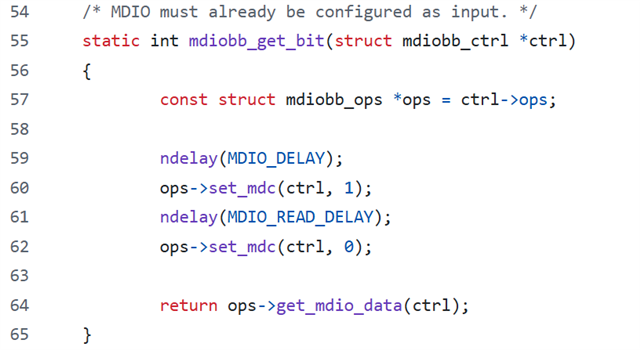
我很困惑、从 MAC 侧(AM64xx)的 MDIO 读取角度来看、哪些信息是正确的。
请您对此发表意见吗?
此致、