请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM5716 主题中讨论的其他器件: TCAN4550、 SysConfig、 SN65HVS882
工具/软件:
您好:
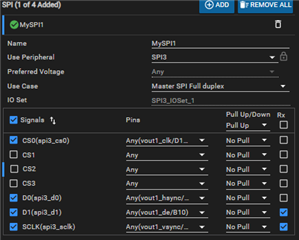
我们正在对 AM5716 上的 tcan4550 进行研究:
我们有以下日志:
1.485839] tcan4x5x spi3.0: no clock found [ 1.485839] tcan4x5x spi3.0: no CAN clock source defined [ 1.485870] tcan4x5x spi3.0: setup mode 0, 8 bits/w, 10000000 Hz max --> 0 [ 1.485931] tcan4x5x spi3.0: GPIO lookup for consumer device-wake [ 1.485931] tcan4x5x spi3.0: using device tree for GPIO lookup [ 1.485931] of_get_named_gpiod_flags: can't parse 'device-wake-gpios' property of node '/ocp/interconnect@48000000/segment@0/target-module@b8000/spi@0/tcan4x5x@0[0]' [ 1.485992] of_get_named_gpiod_flags: can't parse 'device-wake-gpio' property of node '/ocp/interconnect@48000000/segment@0/target-module@b8000/spi@0/tcan4x5x@0[0]' [ 1.486022] tcan4x5x spi3.0: using lookup tables for GPIO lookup [ 1.486022] tcan4x5x spi3.0: No GPIO consumer device-wake found [ 1.486053] tcan4x5x spi3.0: GPIO lookup for consumer reset [ 1.486083] tcan4x5x spi3.0: using device tree for GPIO lookup [ 1.486083] of_get_named_gpiod_flags: parsed 'reset-gpios' property of node '/ocp/interconnect@48000000/segment@0/target-module@b8000/spi@0/tcan4x5x@0[0]' - status (0) [ 1.486175] gpio gpiochip2: Persistence not supported for GPIO 20 [ 1.487304] tcan4x5x spi3.0: GPIO lookup for consumer device-state [ 1.487304] tcan4x5x spi3.0: using device tree for GPIO lookup [ 1.487335] of_get_named_gpiod_flags: can't parse 'device-state-gpios' property of node '/ocp/interconnect@48000000/segment@0/target-module@b8000/spi@0/tcan4x5x@0[0]' [ 1.487365] of_get_named_gpiod_flags: can't parse 'device-state-gpio' property of node '/ocp/interconnect@48000000/segment@0/target-module@b8000/spi@0/tcan4x5x@0[0]' [ 1.487396] tcan4x5x spi3.0: using lookup tables for GPIO lookup [ 1.487426] tcan4x5x spi3.0: No GPIO consumer device-state found [ 1.487579] tcan4x5x spi3.0: Unsupported version number: 0 [ 1.487609] tcan4x5x: probe of spi3.0 failed with error -22
设备树
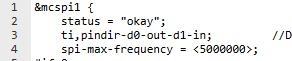
&mcspi3 {
status = "okay";
ti,pindir-d0-out-d1-in; //D0: MOSI ; D1: MISO;
spi-max-frequency = <10000000>;
tcan4x5x: tcan4x5x@0 {
compatible = "ti,tcan4x5x";
reg = <0>;
#address-cells = <1>;
#size-cells = <1>;
spi-max-frequency = <10000000>;
bosch,mram-cfg = <0x0 0 0 16 0 0 1 1>;
interrupt-parent = <&gpio5>;
interrupts = <6 IRQ_TYPE_LEVEL_LOW>;
//device-state-gpios = <&gpio3 21 GPIO_ACTIVE_HIGH>;
//device-wake-gpios = <&gpio1 15 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio8 20 GPIO_ACTIVE_LOW>;
};
};
逻辑分析:
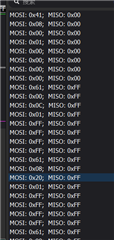
SPI 可以发送数据、但只接收 0x00 0xFF
谢谢