请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:SK-AM62-LP
你好, Gibbs、
我们已经解决了 MCU 无法在仅模式下控制 IO 的问题。
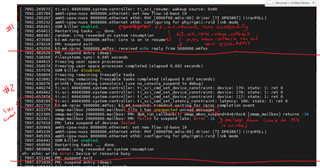
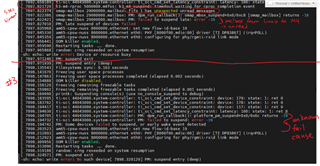
接下来、请优先解决 MCU 唤醒 soc 并导致 IPC 崩溃和自动重启的问题
谢谢
你好, Gibbs、
我们已经解决了 MCU 无法在仅模式下控制 IO 的问题。
接下来、请优先解决 MCU 唤醒 soc 并导致 IPC 崩溃和自动重启的问题
谢谢