Other Parts Discussed in Thread: AM62P
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
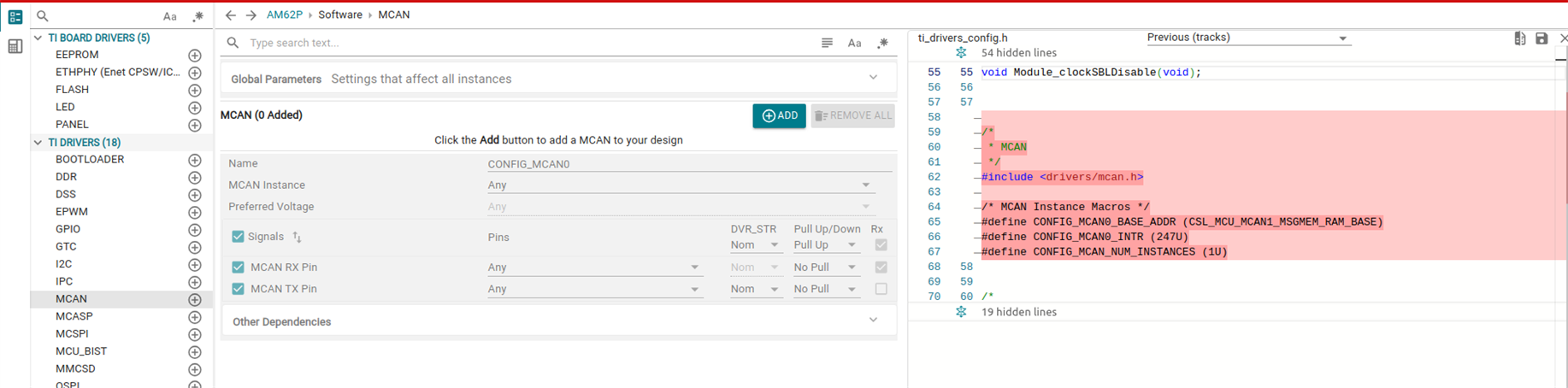
如何从 MCU 域内核 (MCU R5F 或 M4F) 访问主域 MCAN 实例 (MCAN0/MCAN1)?
Other Parts Discussed in Thread: AM62P
如何从 MCU 域内核 (MCU R5F 或 M4F) 访问主域 MCAN 实例 (MCAN0/MCAN1)?