Other Parts Discussed in Thread: SK-AM62P-LP, SN65HVD230
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号: AM62P
主题: SN65HVD230 中讨论的其他器件
大家好:
目前、我们正在按照 MCAN Linux 指南第 4.1.5 节中的说明、在 Falcon 引导 (SBL + Linux) 期间在 A52 Linux 内核上测试 CAN 设置。 平台运行的是 SDK 11.02。
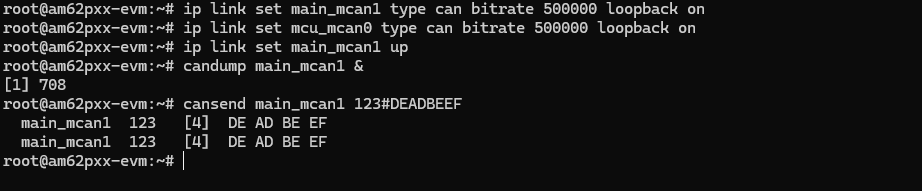
我们使用板上的两个端子成功测试了内部环回(不需要额外设置)。 在一个终端中、我们执行 cansend、而另一个candump则运行以侦听消息。 此测试按预期运行。
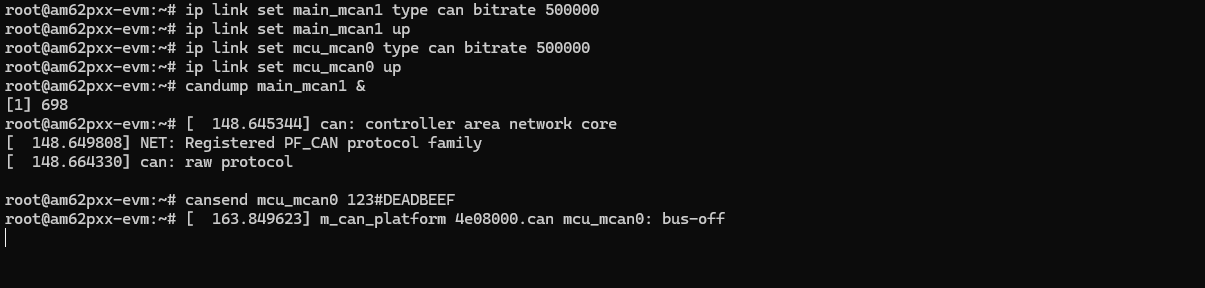
但是、我们在尝试外部环回时会遇到问题。 具体而言、我们main_mcan1 (J1 connector pins 1 and 2)mcu_mcan0 (J11 connector pins 22 and 16)使用跳线连接了和接口。 发送消息时、接口最终进入 总线关闭 状态和停止工作。 我们使用电路板原理图验证了 TX/RX 引脚位置、但我们可能错过了接线中的某些内容。
此外、我们尝试使用外部 CAN 发送器。 我们将一个矢量 VN1610 器件连接到了连接器 J1 在 EVM 板上使用跳线、并通过 USB-C 将 VN1610 连接到 PC 我们使用基于 Vector XL 驱动程序库 API 的 PC 应用程序来传输 CAN 帧、但行为保持不变、接口仍会转换到 总线关闭 状态。
您能否提供有关此行为的可能原因的建议? 此外、是否有办法在 Linux 中为 CAN 子系统启用额外的调试日志记录、以帮助更低层面地诊断潜在问题?
我们将附上硬件设置和布线的图像、以供参考。
此致、
Dušan μ s