您好!
对于下面附加的帖子、抱歉、我无法回复 我的帖子、因此我创建了一个新的主题进行回复
PROCESSOR-SDK-AM437X:在启用 CAN 接口时收到超时消息。 -处理器论坛-处理器- TI E2E 支持论坛
[摩尼什]:
我们正在对定制板中可用的所有接口进行持续环境测试。 每个接口测试是顺序的、每次迭代 大约需要 1.5分钟来完成自定义电路板中所有接口的测试。 我们在定制板中使用两个 CAN 接口、并对两个端口进行环回以进行环境测试。 我们可以在两个端口上发送和接收消息。 我们使用这些命令设置比特率并启用 CAN 端口。
#IP LINK SET CAN0 TYPE CAN 比特率1000000 # SET 比特率
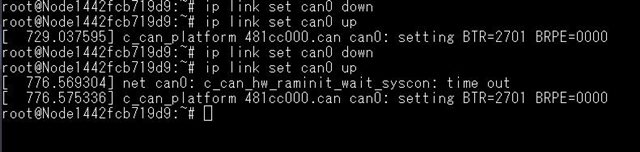
#IP link set CAN0 up # set CAN0 up
#IP LINK SET CAN1 TYPE CAN 比特率1000000 # SET 比特率
#IP link set CAN1 up # set CAN1 up
当我们使用上述命令时、我们将收到如下针对每次迭代(从 Syslog 日志记录)的超时消息。 我们为什么会收到超时消息? 如果系统运行超过24小时,频繁超时错误是否会导致任何问题。
2021-06-04T14:07:42.535150+00:00 AM437X-定制内核:[10615.455475] net CAN0:C_CAN_HW_raminit_wait_SYSCON:超时
2021-06-04T14:07:42.535237+00:00 AM437X-定制内核:[10615.461843] c_CAN_platform 481cc000.can CAN0:设置 BTR=2701 BRPE=0000
2021-06-04T14:07:42.584839+00:00 AM437X-定制内核:[10615.512659] net CAN1:C_CAN_HW_raminit_wait_SYSCON:超时
2021-06-04T14:07:42.595194+00:00 AM437X-定制内核:[10615.519524] c_CAN_platform 481d0000.can CAN1:设置 BTR=2701 BRPE=0000
2021-06-04T14:07:52.615153+00:00 AM437X-定制内核:[10625.533893] c_CAN_platform 481cc000.can CAN0:设置 BTR=2701 BRPE=0000
2021-06-04T14:07:52.665631+00:00 AM437X 自定义内核:[10625.584586] net CAN1:C_CAN_HW_raminit_wait_SYSCON:超时
2021-06-04T14:07:52.665726+00:00 AM437X 自定义内核:[10625.590801] c_CAN_platform 481d0000.can CAN1:设置 BTR=2701 BRPE=0000
2021-06-04T14:08:01.450176+00:00 AM437X-定制 crond[1000]:(根)错误的文件所有者(/var/spool/cron/root)
2021-06-04T14:09:01.451354+00:00 AM437X-定制 crond[1000]:(root)错误的文件所有者(/var/spool/cron/root)
2021-06-04T14:09:07.065079+00:00 AM437X-定制内核:[10699.987593] c_CAN_platform 481cc000.can CAN0:设置 BTR=2701 BRPE=0000
2021-06-04T14:09:07.115002+00:00 AM437X-定制内核:[10700.038186] Net CAN1:C_CAN_HW_raminit_wait_SYSCON:超时
2021-06-04T14:09:07.115089+00:00 AM437X-定制内核:[10700.044657] c_CAN_platform 481d0000.can CAN1:设置 BTR=2701 BRPE=0000
2021-06-04T14:09:17.144960+00:00 AM437X-定制内核:[10710.067504] net CAN0:C_CAN_HW_raminit_wait_SYSCON:超时
2021-06-04T14:09:17.145153+00:00 AM437X-定制内核:[10710.073994] c_CAN_platform 481cc000.can CAN0:设置 BTR=2701 BRPE=0000
2021-06-04T14:09:17.205233+00:00 AM437X-定制内核:[10710.122861] c_CAN_platform 481d0000.can CAN1:设置 BTR=2701 BRPE=0000
[舒伊勒·帕顿]
您使用的是哪个版本的内核?
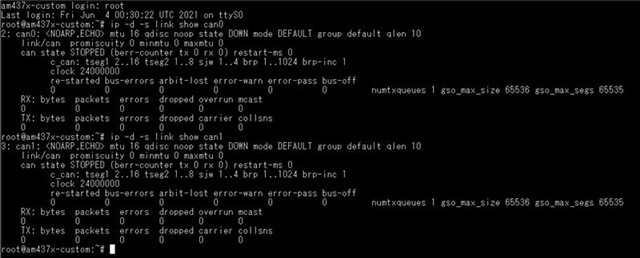
能否为每个接口发布输出?
ip -d -s 链接显示
此致、
Monish P