SDK: processor_sdk_vision_03_05_00_00
配置: tda2xx_evm_BIOS_all
SoC:TDA2SX
操作系统:Windows7.
您好!
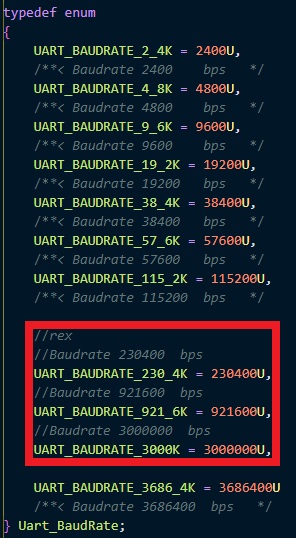
在我的测试中 、我需要为 UART RX 的应用添加一些特定的波特率、然后我成功地添加了非预设的波特率、如下所示。
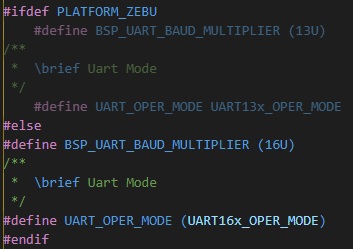
我总共修改了以下6个文件。
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\bsp_uart.h
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\src\bspdrv_uart.c
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\unit_test\uartut\testInput\st_uartConfig.h
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uart.h
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uartCommon.c
TI_components \drivers\pdk_01_10_01_06\packages/ti\drv\bsp_lld\uart\unit_test\uartUt\testLib\st_uartParser.c
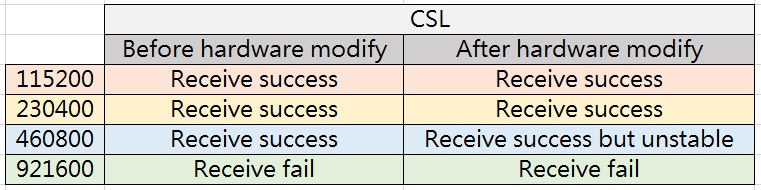
让我们不要谈论这些变化。 无论如何 ,我非常确信,在我更改之后,可以使用230400 bps。
但我不能使用921600 bps 和3000000 bps, 我非常确信 PC 上的 TX 端支持3000000 bps。
然后、我看到了 TRM 上的表格。
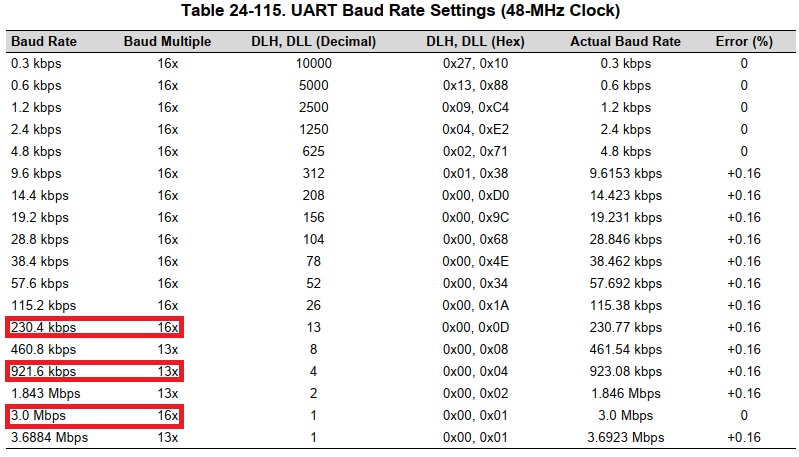
16X 13X 代表什么?
我如何知道我属于哪一类?
这是否意味着如果我要使用921600bps、我必须切换到13X?
如何切换?
如果我可以使用230400 bps、这是否意味着我是16倍? 那么为什么我不能使用3000000 bps?
很抱歉、我一次问了很多问题、但我真的需要这些答案。
请帮助我解决这些问题、谢谢。