请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
Thread 中讨论的其他器件:SYSBIOS工具/软件:TI-RTOS
大家好、
我最近发现了 EtherCAT 同步上的不良行为。
我的配置如下:
Sitara ARM3359
- Code Composer Studio 版本 CCS 6.1.2.00015
-SYS/BIOS 6.45.01.29实时操作系统
- XDC 工具3.32.00.06
-编译器 GNU v4.4.8 (Linaro)
NDK 2.24.3.35
-SYSBIOS SDK 2.1.3.2
-德州仪器 ecat_appl应用 软件、带 beckoff path v5.11
我的 EtherCAT 帧的周期时间配置为500us。
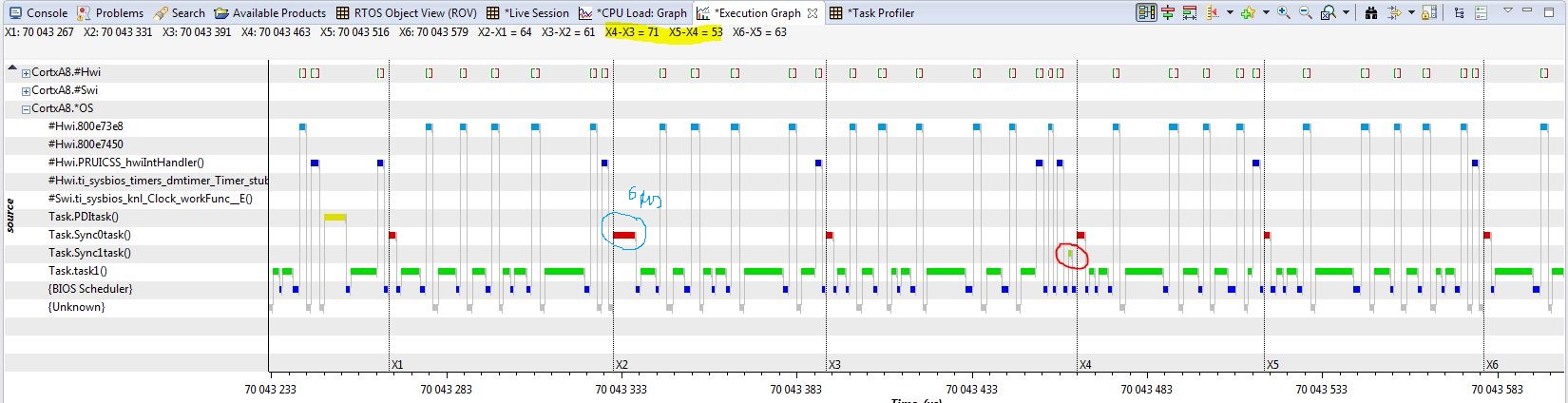
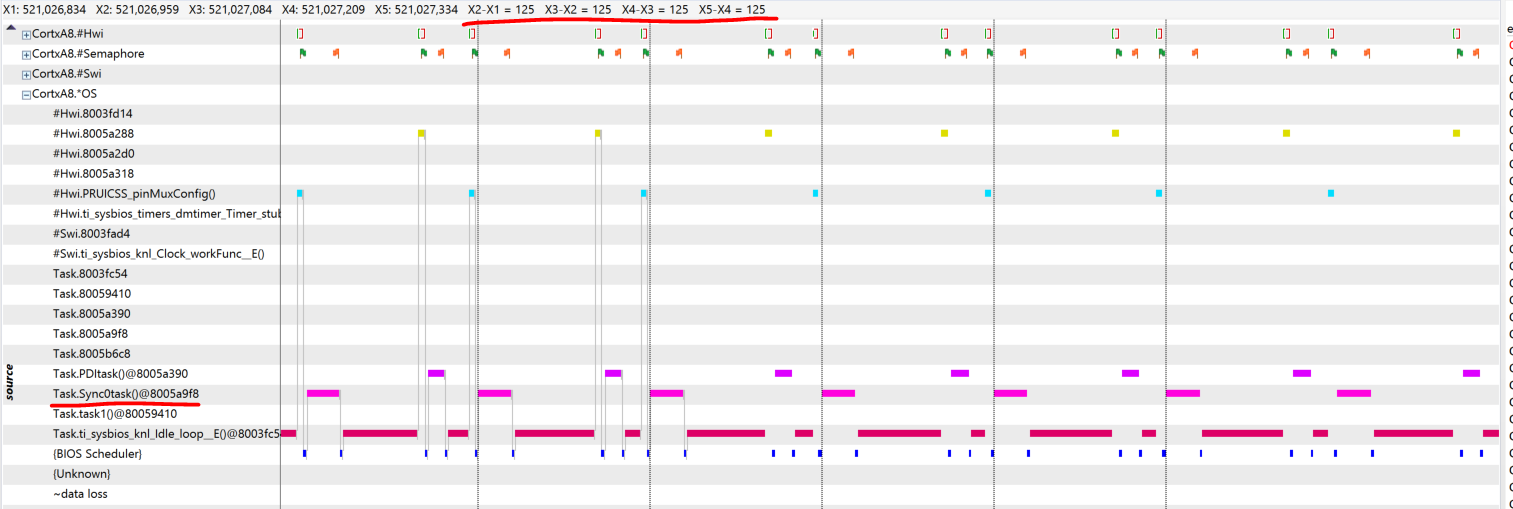
我已启用具有次级周期的直流同步机:Sync0周期时间为62.5us/ Sync1周期时间为500us。
我已经对 Sync0抖动进行了多次测试,在这种配置中,这种测试应该非常少,而且重复结果很糟糕: 我的抖动是+- 10us,这对我们来说是可怕的!
有人能解释一下这种抖动,以及如何大幅减少抖动吗?
感谢你的帮助。
Laurence