请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRA726 主题中讨论的其他器件:DRA722、 DRA72、 TPS51200、 TLV320AIC3104
工具/软件:Linux
我对 UART2有一些问题、似乎找不到解决方案。 传输工作正常。 我使用较低的波特率获得1.3毫秒的中断。
所有示波器信号看起来都很好、时序与采用旧 Jujitsu 处理器的监测计上的时序相同。 我能够让从监测计和警告灯正常工作。
当我发送需要测量仪表或输入模块响应的消息时、输入模块会出现问题。
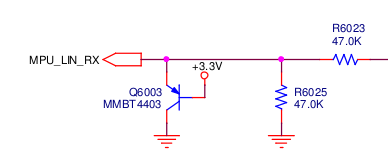
在 LIN_OUT 和 MPU_LIN_RX 上、示波器上的信号都正常、但我在 UART RX 线路上没有信号。
如果我更改为使用 GPIO 而不是 UART 引脚、我能够切换 TX 并读取 RX 线上的状态。
我尝试了分块和非分块模式、选择和不选择。
我还尝试了使用 echo 和 cat 进行常规 UART 程序和命令行访问、无法从 UART2读取任何内容
我没有 UART1或 UART3问题。 我还没有尝试过 UART9。
我向 Nicolas Le LAN (法国)提供了原理图。 ACTIA 的基地是法国的 ACTIA Automotive。 ACTIA Corp 位于印第安纳州、但我们的 TI 联系人是 ACTIA Automotive 公司的联系人。
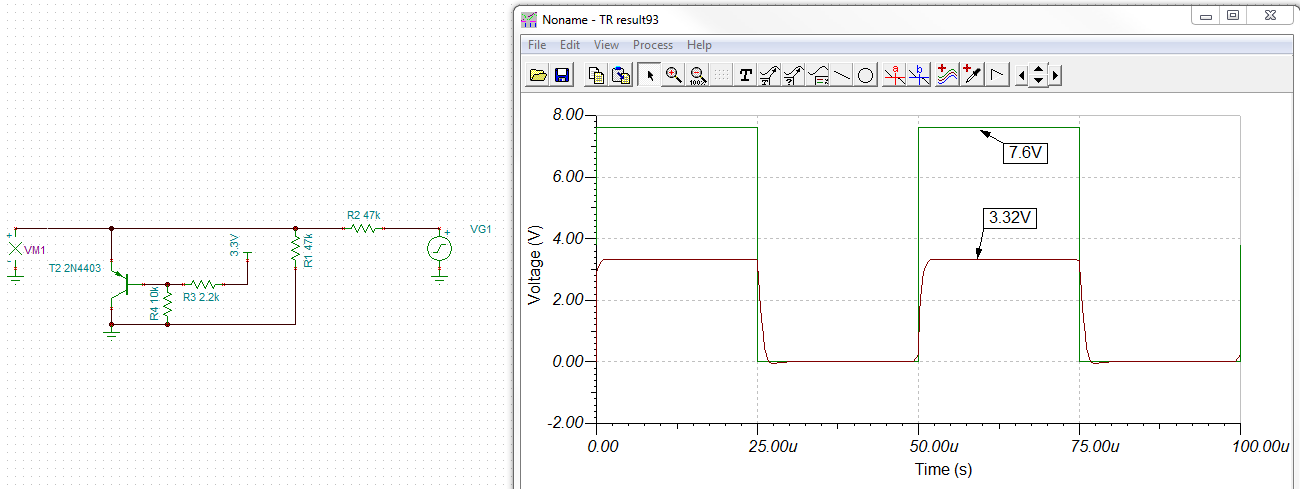
这些电路可实现3.3V 至7.6V 的正确电压转换、这是我们的监测计和警告模块使用的电压。
Michel Catudal
ACTIA Corp.