

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:SK-AM64B 主题中讨论的其他器件:SK-AM62B、
您好、TI 专家!
客户正在评估我们用于驱动两个伺服电机的 AM64器件的性能。
他们应用的 SDK 版本是 SDK9.2 (早期发布的版本、我听说最终的 SDK9.2版本仍在进行中) RT-Linux SDK 默认映像。
它们在 A53内核上的 Codesys 内部运行 EtherCAT 主站和软运动模块、并驱动两个伺服电机、如下所示。
数据路径为:Codesys -> CPSW2G -> A53 ->伺服电机
但是、性能是无法预料的。
最大周期时间达到了1313us、最大抖动达到了227us、如下所示。
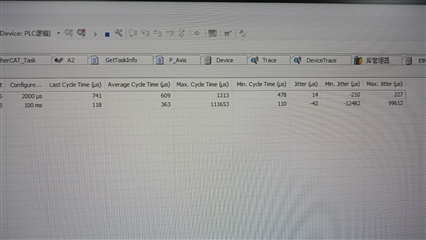
由于周期时间和抖动非常高、它会导致 数据帧丢失、伺服 电机最终停止。
我们进行了搜索、了解我们有一些基准测试、例如运行 AM64x EtherCAT 主站作为从站连接到 AM24x、然后驱动伺服电机。
对于本客户实验、由于客户希望在不使用 AM24x 的情况下实现 AM64x 上的所有功能、因此上述高延迟对驱动伺服电机具有更大的影响。
请问有什么改善性能的建议吗?
我还可以知道即将推出的 SDK9.2最终版本将具有更好的性能吗?
非常感谢!
凯文
