

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:SK-AM62-LP 主题中讨论的其他器件:SysConfig
工具与软件:
您好!
我将使用 McASP 驱动程序来编写一个应用程序。
我成功地配置了 McASP0驱动器实例、以通过单个串行器(AXR0或 AXR1)以48kHz 的速率传输8槽/16位 TDM 帧:
- AXR0:
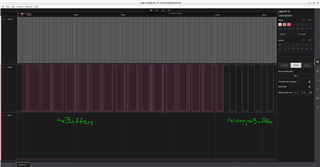
- AXR1:
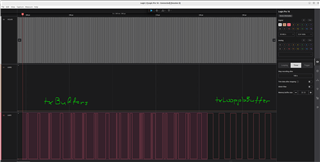
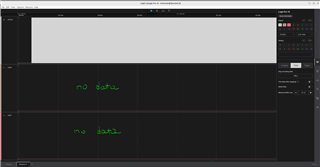
问题是、当我启用2个串行器(即 AXR0和 AXR1)并运行非常相同的应用 时、我无法在相应的串行数据引脚上看到任何数据-我只能看到串行位时钟信号:
我想知道如何启用2个串行器、以便它们可以同时为两个引脚上的数据提供服务。
在 SysConfig 中添加第二个串行器是否足够?
我是否需要发送更多数据?
是否有任何实现 TDM 多槽多串行器案例的示例应用可用?
下面是应用代码和 SysConfig 设置示例:
-应用程序:
#include "mcasp_util.h"
#include "ti_drivers_config.h"
#include <FreeRTOS.h>
#include <drivers/mcasp.h>
#include <kernel/dpl/CacheP.h>
#include <kernel/dpl/DebugP.h>
#include <task.h>
#include <stdint.h>
#include <string.h>
#define SLOT_COUNT (8u)
#define SLOT_SIZE_IN_B (4u)
#define FRAME_COUNT (2u)
#define FRAME_SIZE_IN_B (SLOT_COUNT * SLOT_SIZE_IN_B)
#define DATA_SIZE_IN_B (FRAME_COUNT * FRAME_SIZE_IN_B)
#define LOOPJOB_BUFFER_SIZE_IN_B (FRAME_SIZE_IN_B)
uint8_t txBuffers[FRAME_COUNT][FRAME_SIZE_IN_B] __attribute__((aligned(256)));
MCASP_Transaction txTransactions[FRAME_COUNT] = {};
uint32_t volatile txCallbackCallCount = 0u;
extern uint8_t txLoopjobBuffer[];
static void fillTxBuffers(uint8_t (* const buffer)[FRAME_COUNT][FRAME_SIZE_IN_B])
{
for (uint32_t i = 0u; i < FRAME_COUNT; ++i)
{
for (uint32_t j = 0u; j < FRAME_SIZE_IN_B; ++j)
{
(*buffer)[i][j] = (FRAME_SIZE_IN_B * i + j) % 256u;
}
}
}
static void fillLoopjobBuffer(
uint8_t (* const buffer)[LOOPJOB_BUFFER_SIZE_IN_B],
uint32_t const value)
{
for (uint32_t i = 0u; i < LOOPJOB_BUFFER_SIZE_IN_B; i += 4u)
{
*((uint32_t*)(&((*buffer)[i]))) = value;
}
}
static void submitBuffers(
MCASP_Handle const handle,
MCASP_Transaction (* const transactions)[FRAME_COUNT],
uint8_t (* const buffers)[FRAME_COUNT][FRAME_SIZE_IN_B],
int32_t (* const callback)(MCASP_Handle, MCASP_Transaction*))
{
for (uint32_t i = 0u; i < FRAME_COUNT; ++i)
{
(*transactions)[i].buf = &(*buffers)[i];
(*transactions)[i].count = FRAME_SIZE_IN_B / SLOT_SIZE_IN_B;
(*transactions)[i].timeout = 0xFFFFFFFFu;
callback(handle, &(*transactions)[i]);
}
}
static void awaitTransferCompletion(void)
{
vTaskDelay(pdMS_TO_TICKS(100u));
}
static void withdrawBuffers(
MCASP_Handle const handle,
MCASP_Transaction* (* const callback)(MCASP_Handle))
{
while (callback(handle) != NULL)
{
}
}
void mcaspMain(void* args)
{
MCASP_Handle handle;
fillTxBuffers(&txBuffers);
CacheP_wb(&txBuffers, DATA_SIZE_IN_B, CacheP_TYPE_ALL);
fillLoopjobBuffer(&txLoopjobBuffer, 0xFFFFFFFFu);
CacheP_wb(&txLoopjobBuffer, LOOPJOB_BUFFER_SIZE_IN_B, CacheP_TYPE_ALL);
handle = MCASP_getHandle(CONFIG_MCASP0);
DebugP_assert(handle != NULL);
submitBuffers(
handle,
&txTransactions,
&txBuffers,
&MCASP_submitTx
);
DebugP_assert(MCASP_startTransferTx(handle) == SystemP_SUCCESS);
awaitTransferCompletion();
MCASP_stopTransferTx(handle);
withdrawBuffers(handle, &MCASP_withdrawTx);
}
void runOnTransmittingData(
MCASP_Handle handle,
MCASP_Transaction* const transaction)
{
++txCallbackCallCount;
}
- SysConfig 设置:
/**
* These arguments were used when this file was generated. They will be automatically applied on subsequent loads
* via the GUI or CLI. Run CLI with '--help' for additional information on how to override these arguments.
* @cliArgs --device "AM62x" --package "AMC" --part "Default" --context "a53ss0-0" --product "MCU_PLUS_SDK_AM62x@09.02.01"
* @versions {"tool":"1.20.0+3587"}
*/
/**
* Import the modules used in this configuration.
*/
const mcasp = scripting.addModule("/drivers/mcasp/mcasp", {}, false);
const mcasp1 = mcasp.addInstance();
const debug_log = scripting.addModule("/kernel/dpl/debug_log");
const mmu_armv8 = scripting.addModule("/kernel/dpl/mmu_armv8", {}, false);
const mmu_armv81 = mmu_armv8.addInstance();
const mmu_armv82 = mmu_armv8.addInstance();
/**
* Write custom configuration values to the imported modules.
*/
mcasp1.$name = "CONFIG_MCASP0";
mcasp1.txHclkSourceMux = 2;
mcasp1.rxHclkSourceMux = 2;
mcasp1.txCallbackFxn = "runOnTransmittingData";
mcasp1.rxCallbackFxn = "runOnReceivingData";
mcasp1.txLoopjobBuf = "txLoopjobBuffer";
mcasp1.rxLoopjobBuf = "rxLoopjobBuffer";
mcasp1.rxActiveSlotMask = 0x3;
mcasp1.rxDataMask = 0xFFFFFFFF;
mcasp1.enableLoopback = false;
mcasp1.clkSyncMode = "ASYNC";
mcasp1.enableMcaspRx = false;
mcasp1.TxMode = "TDM";
mcasp1.NumTxSlots = 8;
mcasp1.txAfifoEnable = false;
mcasp1.txActiveSlotMask = 0xFF;
mcasp1.txFsPolarity = 0;
mcasp1.txBitClkPolarity = 0;
mcasp1.txDataDelay = 0;
mcasp1.TxSlotSize = 16;
mcasp1.txDataMask = 0xFF000000;
mcasp1.txLoopjobBufLength = 16;
mcasp1.MCASP.$assignAllowConflicts = "MCASP0";
mcasp1.mcaspSer.create(2);
mcasp1.mcaspSer[0].$name = "CONFIG_MCASP_SER0";
mcasp1.mcaspSer[0].MCASP.$assignAllowConflicts = "MCASP0";
mcasp1.mcaspSer[1].$name = "CONFIG_MCASP_SER1";
mcasp1.mcaspSer[1].serNum = 1;
mcasp1.mcaspSer[1].MCASP.$assignAllowConflicts = "MCASP0";
scripting.suppress("Resource conflict,MCASP0 is also in use by @@@.+?@@@, @@@.+?@@@", mcasp1.MCASP, "$assign");
scripting.suppress("Resource conflict,MCASP0 is also in use by @@@.+?@@@, @@@.+?@@@", mcasp1.mcaspSer[0].MCASP, "$assign");
scripting.suppress("Resource conflict,MCASP0 is also in use by @@@.+?@@@, @@@.+?@@@", mcasp1.mcaspSer[1].MCASP, "$assign");
const udma = scripting.addModule("/drivers/udma/udma", {}, false);
const udma1 = udma.addInstance({}, false);
udma1.$name = "CONFIG_UDMA0";
mcasp1.bcDmaDriver = udma1;
const udma2 = udma.addInstance({}, false);
udma2.$name = "CONFIG_UDMA1";
mcasp1.pktDmaDriver = udma2;
debug_log.enableUartLog = true;
debug_log.uartLog.$name = "CONFIG_UART_CONSOLE";
debug_log.uartLog.UART.$assign = "USART0";
mmu_armv81.size = 0x80000000;
mmu_armv81.$name = "SOC_MEM_REGION";
mmu_armv82.vAddr = 0x80000000;
mmu_armv82.pAddr = 0x80000000;
mmu_armv82.size = 0x80000000;
mmu_armv82.attribute = "MAIR7";
mmu_armv82.$name = "DDR_REGION";
/**
* Pinmux solution for unlocked pins/peripherals. This ensures that minor changes to the automatic solver in a future
* version of the tool will not impact the pinmux you originally saw. These lines can be completely deleted in order to
* re-solve from scratch.
*/
mcasp1.MCASP.AFSX.$suggestSolution = "MCASP0_AFSX";
mcasp1.MCASP.ACLKX.$suggestSolution = "MCASP0_ACLKX";
mcasp1.SYSTEM.$suggestSolution = "SYSTEM0";
mcasp1.mcaspSer[0].MCASP.AXR0.$suggestSolution = "MCASP0_AXR0";
mcasp1.mcaspSer[1].MCASP.AXR1.$suggestSolution = "MCASP0_AXR1";
debug_log.uartLog.UART.RXD.$suggestSolution = "UART0_RXD";
debug_log.uartLog.UART.TXD.$suggestSolution = "UART0_TXD";
BR、
Maciek
