请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TDA4VE-Q1 工具与软件:
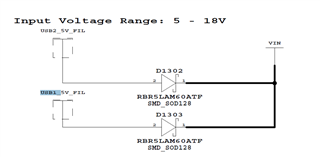
我们从805升级到902、发现没有 USB 电缆无法打开。 问题是 SBL。 它可以在连接 USB 后打开。
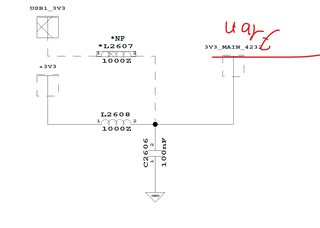
我们已经排除了、它与 USB 电源无关
我们已经排除了 USB 电源与 USB 电源无关。 我不知道 UART 是否唤醒机器(机器可能处于睡眠模式、但此时未连接 USB 电缆时、电流约为0.48A、因此感觉不是处于睡眠模式)
我用了一根计算机无法识别的电缆(它应该是一根只具有充电功能的电缆、应该是一根没有 D+/D-的电缆)。 它还可以在连接时打开机器。 此外、我通过连接 USB 电缆开启了机器。 当我拔下机器的插头时、电流下降了大约一半。 当我再次连接它时,打印机上的打印件似乎正在打开。