请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
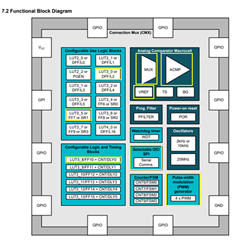
器件型号:TPLD1201 主题中讨论的其他器件: TPLD1202
工具与软件:
您好!
我们正在考虑使用 TPLD1201来检测线圈电流并执行电流反馈控制的解决方案。
TPLD1201的输入是电流命令值(模拟)和电流反馈(模拟)。
TPLD1201的输出计划是一个输出(2个或4个输出)、用于通过 PWM 控制 H 桥、并且我们还想调整 PI 稳压器的增益。
您能否就这一做法的可行性发表评论?
谢谢!
Conor