This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/processors-group/processors/f/processors-forum/1432141/am6422-sdk-8-6-timer-compare-and-capture-modes
工具与软件:
您好!
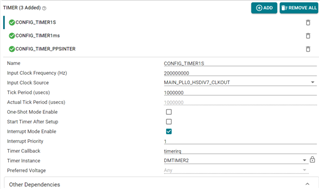
我们要使用计时器的输入捕获功能、但在 SysConfig 软件中未看到计时器和引脚之间的连接。 是否有任何相关的样片计划?
我已将您的主题分配给了我们的一名团队成员。 请注意,这是一个在印度的假日周。 如果您在几个工作日内未收到回复、请在下周随意点击该主题帖。
此致、
Nick
我们正在等待您的回复、有任何消息吗?
您好、Wanglili、
感谢您的耐心。
当我们讨论计时器时、目前没有样例程序。 这可能会出现在未来的 SDK 版本中。
到目前为止、我可以提供的唯一计时器示例如下: "
对于 AM64x MCU + SDK、我已经编写了一段代码来演示计时器中断。
我已经通过获取下的空应用编写了此应用 MCU_PLUS_SDK/examples/empty 作为基准。
我随附了 zip 文件、以便您继续操作、导入到 CCS 中并在移动中运行该文件。
empty_am64x-sk_r5fss0-0_nortos_ti-arm-clang.zip
"
Vaibhav
我了解计时器中断的这种用法。 目前我们要使用计时器采集、是否还不受支持? 我们的使用方案如下:通过 GPS pps 脉冲中断清除计时器值、并在一个计算周期内修改计时器的计数值、以便实现与第二个脉冲相同的频率计数。 我 目前有一些问题、我希望你可以帮助分析它。
首先介绍我的应用背景。
1、、一个完整的第二计时器定义了200MHz 的时钟频率、中断优先级为1 μ s、如列表中所示
2 μ s、捕获中断捕获 GPS 的 PPS 脉冲
3 μ s、 PPS 脉冲时、首先关闭中断、然后将计时器计数恢复到初始值、μ s、然后 打开中断。
4、在输入捕捉中断时记录当前计时器计数、从大约30个计数值计算平均值、并使用该平均值作为计时器的负载值。
difarr 为重新加载值。
5、通过4计算,调整计时器基本上与 GPS 的 PPS 一致。 此时有2个外部中断、但中断优先级低于捕捉中断。
6 μ s、SPI 与外部器件交换数据时、捕获中断计时器的计数不稳定、偏差达到4us、但当 SPI 未运行时、捕获中断到达时计时器计数误差基本上在1us 以内。
7、我还使用系统时钟进行测试、结果是在使用 SPI 时错误为3-4 μ s。
关于我的现象、如何验证问题是什么? 如有任何疑问、请随时提醒我添加说明。
感谢您的详细解释。
目前、从 TI 的软件产品的角度来看、我们不支持计时器捕获和比较。
我会密切关注该主题、并在我们开始支持该功能时通知您。
您好、
好的、非常感谢。 但是、您是否阅读了我上面提出的问题? 当我使用它时、我发现计时器计数不准确。 问题可能是什么? 是否有可调用的 API 函数来清除计时器计数?
还有一个问题、如何在中断模式下使用 FIQ? 当它被设定为1时、它的优先级应该高于 IRQ 吗?
我在这里的测试中发现了一种现象。 当我在 DDR 上运行程序时、如果我使用 GPS 对、将会有很大的偏差、但当我在 MSRAM 上运行程序时、不会有如此大的偏差。 这可能与我怀疑的计时器计数不准确无关。 在运行 DDR 时、是否有什么东西会影响中断? 与 DDR 相关的参数是什么?
请等待一段时间、让另一位专家对此发表评论。
AM64X 上提供了计时器模块。 可以支持此计时器来测量 PWM 参数和驱动 PWM 信号。
您可以使用计时器模块捕获 PWM 信号。
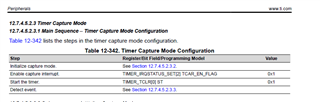
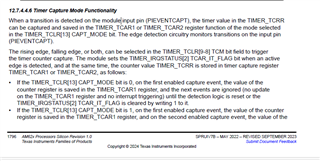
请查看 下面的常见问题解答 和下面的 TRM 章节、对捕获模式进行更改。
我已经创建了一个关于从时间模块生成 PWM 的常见问题解答、同样的过程也可应用于捕捉模式。
https://e2e.ti.com/support/processors-group/processors/f/processors-forum/1377521/faq-processor-sdk-am64x-how-to-create-a-pwm-using-a-timer?tisearch=e2e-sitesearch&keymatch=pwm%20timer%20paula
Anil。
我刚刚联系了 AM64 SOC。 我自己配置该寄存器有点困难。 您能否为我们提供样本程序以供参考? 如果可以的话、那就更好了。
请查看上面有关捕获模式的常见问题解答和 TRM 映像。
您可以轻松执行该操作、并且 很少有寄存器可用于在捕获模式下配置计时器。
请检查常见问题解答代码并为定时器在捕获模式中创建一个示例。
由于、您在捕获模式下需要遵循的相同 PWM 步骤。
我根据您提供的 PWM 示例配置了捕获模式。 当前配置完成后、我会检查寄存器以确认配置已完成、但当前无法接收捕获的信号。 在分析此器件的问题可能发生在哪里时、我需要您的帮助?
我使用 timer7的 u7引脚进行捕获、计时器时钟频率为200MHz、溢出中断周期为1s。我没有 发现配置有问题。 我希望您能帮我找到问题所在。 非常感谢。
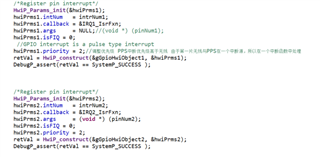
void Timer_config(void) { TimerP_Params timerParams; HwiP_Params timerHwiParams; int32_t status; volatile uint32_t *addr; uint32_t ctrlVal = 0x00; /* set timer clock source */ SOC_controlModuleUnlockMMR(SOC_DOMAIN_ID_MAIN, 2); *(volatile uint32_t*)AddrTranslateP_getLocalAddr(0x430081CC) = 2; SOC_controlModuleLockMMR(SOC_DOMAIN_ID_MAIN, 2); gTimer7BaseAddr = (uint32_t)AddrTranslateP_getLocalAddr(0x2470000u); TimerP_Params_init(&timerParams); timerParams.inputPreScaler = 1; timerParams.inputClkHz = 200000000u; timerParams.periodInNsec = 1000000000u; timerParams.oneshotMode = 0; timerParams.enableOverflowInt = 1; timerParams.enableDmaTrigger = 0; TimerP_setup(gTimer7BaseAddr, &timerParams); addr = (volatile uint32_t *)(gTimer7BaseAddr + 0x38); ctrlVal = ( (1<<1U) | (1<<14U)| (1<<8U) | (1<<5U) ); //Trigger on overflow, Toggle, enable Auto Reload Mode *addr = ctrlVal; addr = (volatile uint32_t *)(gTimer7BaseAddr + 0x2c); ctrlVal = (0x1U << 2)|(0x1U << 1); *addr = ctrlVal; HwiP_Params_init(&timerHwiParams); timerHwiParams.intNum = 159; timerHwiParams.callback = Timer7_isr0; timerHwiParams.isPulse = 0; timerHwiParams.priority = 2; status = HwiP_construct(&gTimerHwiObj[CONFIG_TIMER1S], &timerHwiParams); DebugP_assertNoLog(status==SystemP_SUCCESS); Pinmux_PerCfg_t Timer_pin_Cfg[] = { { PIN_PRG1_PRU0_GPO17,//U7 ( PIN_MODE(6) | PIN_PULL_DISABLE ) }, {PINMUX_END, PINMUX_END} }; Pinmux_config(Timer_pin_Cfg, PINMUX_DOMAIN_ID_MAIN); TimerP_start(gTimer7BaseAddr);//start timer } void Timer7_isr0(void *args) { // void timerirq(void *args); uint32_t value = 0x00; uint32_t timercnt=0; /* clear status for overflow interrupt */ value = CSL_REG32_RD(gTimer7BaseAddr + 0x28); if(value & (0x1U << 1))//overflow { value = (0x1U << 1) ; CSL_REG32_WR((gTimer7BaseAddr + 0x28), value); timerirq(args); } if(value & (0x1U << 2))//capture { value = (0x1U << 2) ; CSL_REG32_WR((gTimer7BaseAddr + 0x28), value); timercnt = CSL_REG32_RD(gTimer7BaseAddr + 0x50); timercnt = timercnt - (0xffffffff-(200000000-1)); PPS_IsrFxn1(timercnt,0); } TimerP_clearOverflowInt(gTimer7BaseAddr); HwiP_clearInt(159); }
您可能会 在1月2日收到回复、今天我正忙于其他升级。
对延迟答复深表歉意。
有新消息吗? 我们正在等待您的回复。
尊敬的 Wanglili:
该主题专家目前在本周和下周不在办公室。 请预计响应会延迟。 感谢您的耐心。
Tushar




 difarr 为重新加载值。
difarr 为重新加载值。