请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR6843AOP 主题中讨论的其他器件:AWR1843
工具与软件:
您好、我遇到了设备停止响应 CLI 命令的问题、
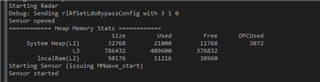
我们的系统同时包含 MSS (DPM)和 DSS (DPC)、但当前在 sensorStart 命令之后、软件似乎卡住了。
我一直无法找到软件似乎卡住的地方。 但是、我已经能够确认以下事项:
处理器能够同步。
CLI 已启动
成功调用 MMWave_start
和 mmw_sensor execute 都被调用。
最后一个似乎被调用的函数是 MMW_EXECUTE。
但是、MSS 上的 DPM 已启动
DSS 上的 DPC 永远不会启动、
在 DPM 启动和 DPC 启动之间、我有什么可以看的、因为我认为问题应该存在吗?
很遗憾、我无法共享我的雷达配置、因为它正在开发中、但是如果可以通过电子邮件共享、我们会与 TI 签订 NDA。
谢谢!
Jahiz