请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
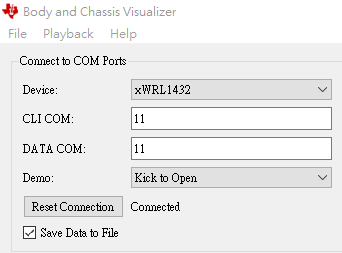
器件型号:AWRL1432BOOST 工具与软件:
我们要参考示例代码 radar_toolbox_2_10_00_04-Kick_to_Open
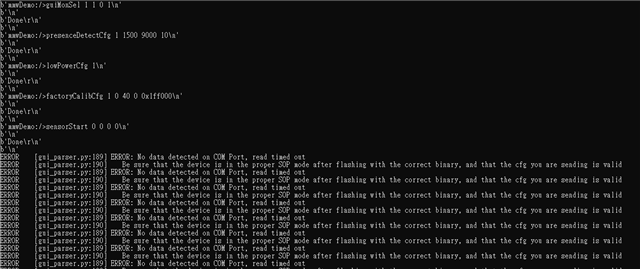
添加了 MMWAVE_L_SDK_05_05_00_02 - drivers\mcan\mcan_external_read_write
但性能似乎不够、无法正常工作! 您是否有任何其他建议或参考资料?
工具与软件:
我们要参考示例代码 radar_toolbox_2_10_00_04-Kick_to_Open
添加了 MMWAVE_L_SDK_05_05_00_02 - drivers\mcan\mcan_external_read_write
但性能似乎不够、无法正常工作! 您是否有任何其他建议或参考资料?