

Other Parts Discussed in Thread: PGA460
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1487176/pga460-eeprom-crc-value
器件型号:PGA460工具与软件:
大家好!
我正在尝试为 PGA460开发一个库、以便在 meteo 站原型中与 STM32F302配合使用。
该站点有3个 PGA460、每个都连接到不同的 UART 端口。 我能够与传感器进行通信、但我的问题是、当我读取测量结果时、第一个字节是用于诊断的0x40。
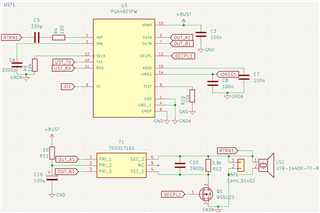
我将从8V/500mA 为 PGA460供电、使用 UTR_1440K_TT_R 作为通过 Wurth Elektronik 750317161连接到 PGA 的传感器、原理图如下所示。
我的调试输出如下、有人能帮助我理解 EEPROM 中的 EEPROM CRC 与计算出的 CRC 有什么不同吗?
另外、在 EEPROM 刻录和下电上电后、我的设置未被保留、这没什么大不了的、因为我可以在每次复位时设置它们、但最好理解它们。
传感器0:正在初始化通信...
传感器0:阈值水平被设定为25%。
传感器0:成功写入阈值。
传感器0:EEPROM 控制寄存器(EE_CTRL)= 0x00
传感器0:超声波命令0已成功执行!
传感器0:频率诊断= 41.67kHz
传感器0:超声波命令0已成功执行!
传感器0:衰减周期诊断= 4080.00us
传感器0:温度(C)数据:32.00
传感器0:内核温度= 32.00°C
传感器0:噪音水平数据:23.00
传感器0:噪声水平= 23 (8位原始)
传感器0:EEPROM 批量写入数据(45字节):
0x55 0x0C 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80
0x08 0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x05 0x97
--------------------------------------------------------
传感器0:批量写入易失性存储器成功!
传感器0:EEPROM 批量读取成功!
传感器0:EEPROM 读回数据(45字节):
0x40 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80 0x08
0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x00 0x05 0x63
传感器0:EEPROM 数据验证成功!
传感器0:EEPROM CRC 不匹配! 预期为0xA3、读取为0x63
传感器0:EEPROM 检查失败。
传感器0:TVG 批量写入成功!
传感器1:正在初始化通信...
传感器1:阈值水平被设定为25%。
传感器1:成功写入阈值。
传感器1:EEPROM 控制寄存器(EE_CTRL)= 0x00
传感器1:超声波命令0已成功执行!
传感器1:频率诊断= 41.67kHz
传感器1:超声波命令0已成功执行!
传感器1:衰减周期诊断= 4080.00us
传感器1:温度(C)数据:28.67
传感器1:芯片温度= 28.67 C
传感器1:噪音水平数据:16.00
传感器1:噪声水平= 16 (8位原始)
传感器1:EEPROM 批量写入数据(45字节):
0x55 0x0C 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80
0x08 0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x05 0x97
--------------------------------------------------------
传感器1:批量写入易失性存储器成功!
传感器1:EEPROM 批量读取成功!
传感器1:EEPROM 读回数据(45字节):
0x40 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80 0x08
0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x00 0x05 0x63
传感器1:EEPROM 数据验证成功!
传感器1:EEPROM CRC 不匹配! 预期为0xA3、读取为0x63
传感器1:EEPROM 检查失败。
传感器1:TVG 批量写入成功!
传感器2:正在初始化通信...
传感器2:阈值水平被设定为25%。
传感器2:成功写入阈值。
传感器2:EEPROM 控制寄存器(EE_CTRL)= 0x00
传感器2:超声波命令0已成功执行!
传感器2:频率诊断= 40.82kHz
传感器2:超声波命令0已成功执行!
传感器2:衰减周期诊断= 4080.00us
传感器2:温度(C)数据:30.67
传感器2:芯片温度= 30.67 C
传感器2:噪音水平数据:21.00
传感器2:噪声水平= 21 (8位原始)
传感器2:EEPROM 批量写入数据(45字节):
0x55 0x0C 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80
0x08 0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x05 0x97
--------------------------------------------------------
传感器2:批量写入易失性存储器成功!
传感器2:EEPROM 批量读取成功!
传感器2:EEPROM 读回数据(45字节):
0x40 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x9D 0xEE 0xEF 0x2D 0xB9 0xEF 0xDC 0x03 0x32 0x80 0x08
0x12 0x32 0x32 0x00 0x33 0xEE 0x3C 0x8F 0x00 0x00 0x05 0x63
传感器2:EEPROM 数据验证成功!
传感器2:EEPROM CRC 不匹配! 预期为0xA3、读取为0x63
传感器2:EEPROM 检查失败。
传感器2:TVG 批量写入成功!
PGA460初始化完成。
传感器0:超声波命令0已成功执行!
传感器0:回声数据转储诊断错误! 代码:64
传感器0:回波数据转储(130字节):0x40 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xF4 0xE4 0xD4 0xC8 0xBC 0xD0 0xF8 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0x05Sensor 0:超声波命令0执行成功!
pga_obj_data_size 6!
传感器0、对象1 -距离:11.24米、宽度:4080 μ s、振幅:191
传感器1:超声波命令0已成功执行!
传感器1:回声数据转储诊断错误! 代码:64
传感器1:回波数据转储(130字节):0x40 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFC 0xDC 0xBC 0xA4 0x90 0x80 0x78 0x74 0x80 0x98 0xBC 0xEC 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xC3Sensor 1:超声波命令0执行成功!
pga_obj_data_size 6!
传感器1、对象1 -距离:11.24米、宽度:4080 μ s、振幅:191
传感器2:超声波命令0已成功执行!
传感器2:回声数据转储诊断错误! 代码:64
传感器2:回波数据转储(130字节):0x40 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xE4 0xCC 0xBC 0xB0 0xA8
0xA4 0x9C 0x98 0x98 0x98 0x9C 0xA0 0xA4 0xA4 0xA4 0xA4 0xA0 0x98 0x84 0xA8 0xE4
0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
0xFF 0xF1传感器2:超声波命令0已成功执行!
pga_obj_data_size 6!
传感器2、对象1 -距离:11.24米、宽度:4080 μ s、振幅:191
感谢您的支持。
