Other Parts Discussed in Thread: IWRL6432AOP, IWRL6432BOOST, UNIFLASH, IWRL6432, SYSCONFIG
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1460366/iwrl6432boost-iwrl6432
器件型号:IWRL6432BOOST主题中讨论的其他器件: UNIFLASH、 IWRL6432、 SysConfig、IWRL6432AOP
工具与软件:
我准备了 IWRL6432Boost EVM。 我想检测人,当检测到人时,我需要通过 UART 将数据发送到另一个主机 MCU。
尝试使用 SDK5时、(MMWAVE_L_SDK_05_05_03_00)
工作演示:
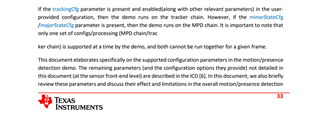
给定 MOTION_AND_INVATION_DETECTION 的演示 与可视化工具配合使用。 然后才能使用进行闪存 Uniflash 在 S1.1、S1.2中打开管理模式。 在刷写 motion_and_presence_detection_demo_auth.Debug.appimage 后、将模式更改为功能模式 S1.1=1。
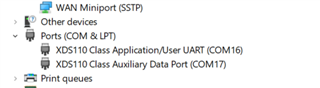
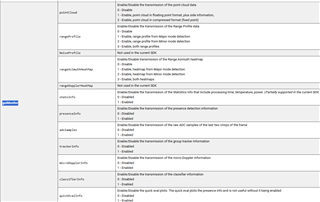
在 Visualizer 工具中、我们需要 通过 UART (此处为 xds1100仿真器)向 IWRL6432器件发送 CLI 配置文件。 之后、 IWRL6432器件将通过 UART 将 TLV 数据发送到可视化工具应用。 这就是我对 SDK 演示的工作原理的理解。
但我想开发自定义代码、
1.电路板初始化,
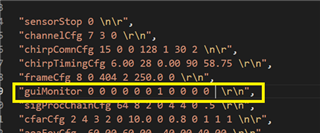
2. CLI 硬编码数据初始化,
3.获取 ADC 数据的功能,处理 ADC 数据到数字前端数据的功能,识别人的功能,查找人的距离功能,
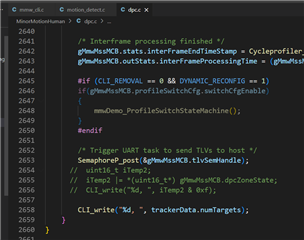
4.根据函数的输出、我可以通过 UART 把数据发送到另一个主机 MCU。
您能告诉我如何执行上述操作吗? 我不想使用 Visualizer/任何其他 python 代码来传输 CLI 命令。 该程序必须从我写入 CLI 变量中的 CLI 数据开始。
我正在努力编辑该演示代码、以使其按照我的自定义要求工作。 希望你能帮我。