

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:DCA1000EVM、
工具与软件:
大家好、团队成员:
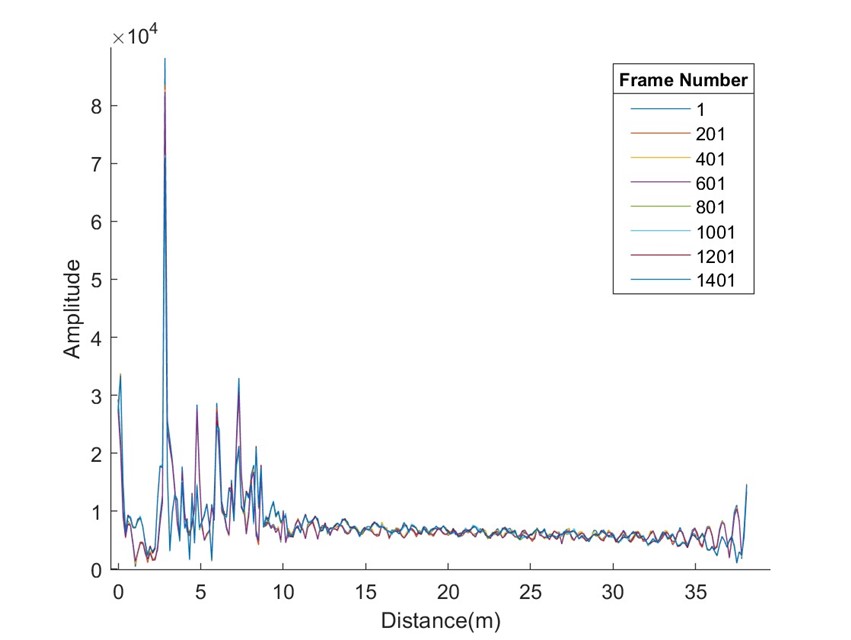
我在静态环境中放置了一个强大的反射器、并且我使用 IWR6843ISK + DCA1000evm 来获取原始 ADC 数据。 在实验过程中、我捕获了1500多帧、并对原始数据执行了距离 FFT。 最强的峰值确实是角反射器是静态的、但来自环境的距离库看起来并非静态的。 但是、我非常确信在雷达 FOV 中进行测量时没有移动任何物体。
我有一些问题、
1.期望这样的东西是正常的吗? 我将帧时间更改为更长(更长的帧间时间)、但仍然存在随时间变化的行为。
2.是否有解决问题的办法? 由于距离 FFT 随时间变化、因此我们更难理解静态环境。
下面是线性调频脉冲和帧的配置。
"rlProfiles": [
{
"rlProfileCfg_t": {
"profileId": 0,
"pfVcoSelect": "0x2",
"pfCalLutUpdate": "0x0",
"startFreqConst_GHz": 60.0,
"idleTimeConst_usec": 5.0,
"adcStartTimeConst_usec": 3.0,
"rampEndTime_usec": 20.0,
"txOutPowerBackoffCode": "0x0",
"txPhaseShifter": "0x0",
"freqSlopeConst_MHz_usec": 50.0,
"txStartTime_usec": 0.0,
"numAdcSamples": 212,
"digOutSampleRate": 12500,
"hpfCornerFreq1": 0,
"hpfCornerFreq2": 0,
"rxGain_dB": "0x1E"
}
}
],
"rlChirps": [
{
"rlChirpCfg_t": {
"chirpStartIdx": 0,
"chirpEndIdx": 0,
"profileId": 0,
"startFreqVar_MHz": 0.0,
"freqSlopeVar_KHz_usec": 0.0,
"idleTimeVar_usec": 0.0,
"adcStartTimeVar_usec": 0.0,
"txEnable": "0x1"
}
}}
"rlFrameCfg_t": {
"chirpEndIdx": 1,
"chirpStartIdx": 0,
"numLoops": 222,
"numFrames": 0,
"framePeriodicity_msec": 11.888,
"triggerSelect": 1,
"numDummyChirpsAtEnd": 0,
"frameTriggerDelay": 0.0}
那么、这是不同帧的距离 FFT。
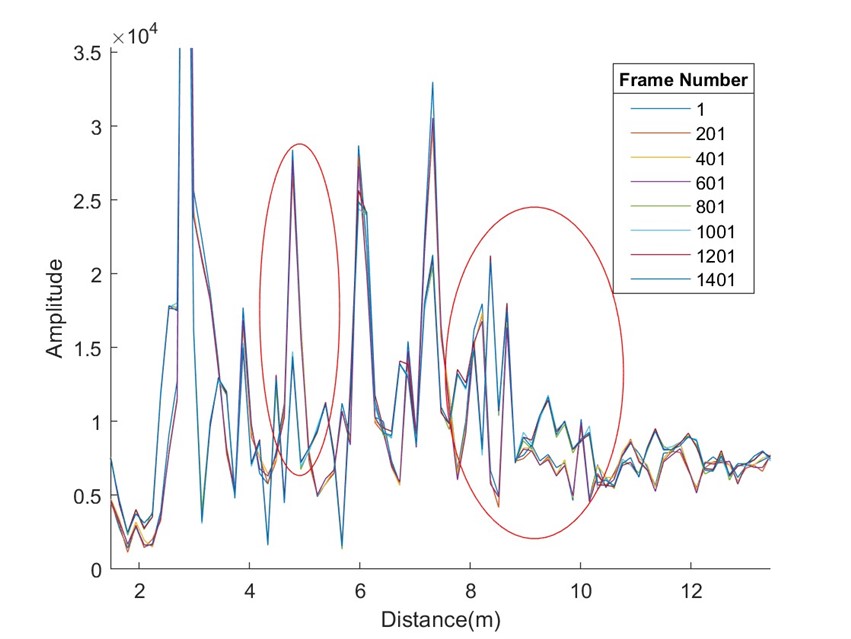
如果我放大以检查除最强峰之外的其他峰值、您可以看到、当帧数增加时、圈中的区域会变得不同。
此致!
是的

