Other Parts Discussed in Thread: DCA1000EVM, IWR6843ISK
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 主题中讨论的其他器件:DCA1000EVM、
工具与软件:
大家好、团队成员:
对于来自原始数据的角度估算、我有一些问题。
如图所示、我测量了雷达左侧的角反射器。

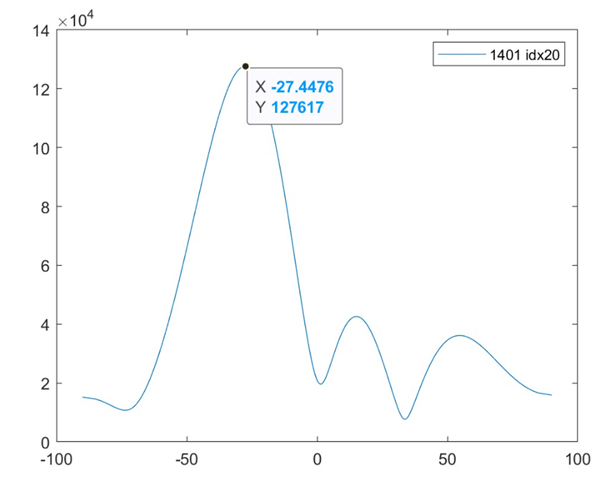
但当我在相应的距离库中执行角度 FFT (513点)时、我得到了负角度处的峰值、如图所示。
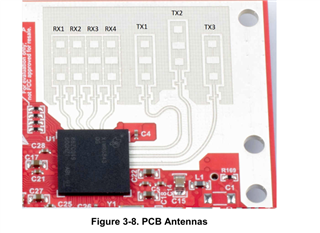
但天线排列如该图所示、这意味着当我们从背面看到雷达板时、天线布局应是 RX4-RX3-RX2-RX1、这也意味着我应该预计角度 FFT 的峰值出现在正角而非负角上。
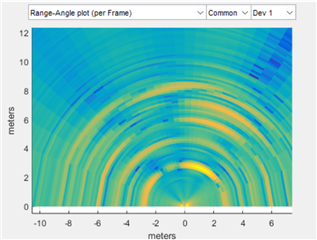
此外、当我在 mmWave Studio 观察热图时、我们也可以看到从右手边的强力反射、这与角反射镜的放置方式矛盾。 我还检查了 MATLAB 示例、如果我计算 x、y、z 坐标、我将获得与 mmWave Studio 所示类似的结果。
if length(angleEst) > 0
for iobj = 1:length(angleEst)
angles_all_points (iobj,1:2)=angleEst(iobj).angles(1:2);
angles_all_points (iobj,3)=angleEst(iobj).estSNR;
angles_all_points (iobj,4)=angleEst(iobj).rangeInd;
angles_all_points (iobj,5)=angleEst(iobj).doppler_corr;
angles_all_points (iobj,6)=angleEst(iobj).range;
%switch left and right, the azimuth angle is flipped
xyz(iobj,1) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
xyz(iobj,2) = angles_all_points (iobj,6)*cosd(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
%switch upside and down, the elevation angle is flipped
xyz(iobj,3) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,2)*-1);
xyz(iobj,4) = angleEst(iobj).doppler_corr;
xyz(iobj,9) = angleEst(iobj).dopplerInd_org;
xyz(iobj,5) = angleEst(iobj).range;
xyz(iobj,6) = angleEst(iobj).estSNR;
xyz(iobj,7) = angleEst(iobj).doppler_corr_overlap;
xyz(iobj,8) = angleEst(iobj).doppler_corr_FFT;
end
实际上、我几乎每个线程都谈到了同一个问题、例如、
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/926713/awr1443boost-aoa-estimation
但它们都没有给出关于反向角度的问题的具体答案。
Ω、我对有关角度 FFT 的培训视频(www.ti.com/.../5415560018001、图与文本不匹配、当雷达左侧的物体时、图中显示 小于0。

最后、我的问题是、
如何理解通道1、2、3、4到 RX1、2、3、4的映射?
在进行角度估算时、区分负角度和正角度的正确方法是什么?
我非常期待您的回复! 提前感谢!
此致!
是的