请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944EVM 主题中讨论的其他器件: AWR2944、AWR1642、 AWR1843
工具/软件:
我有 AWR2944EVM、在刷写 TDM 应用程序后、我能够成功连接到演示可视化工具。
我将传感器放置在前面有一个大金属物体的位置。 此金属物体宽度为60cm、高度为180cm。 距离传感器大约2m。 在演示可视化工具上、我只能看到1个目标!! 我希望这个对象能有更多的目标。
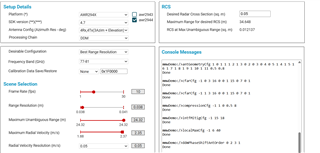
-你认为我需要对配置做一些更改吗?
-只是为了确认,默认模式是一个目标模式,还是一个目标模式"目标集群"?